
【導(dǎo)讀】據(jù)保守估計(jì),目前全球至少安裝了25萬臺風(fēng)輪機(jī)。未來四年里,全球風(fēng)輪機(jī)市場預(yù)計(jì)將增長278 GW的陸上容量、44.3 Gw的海上容量。1 這相當(dāng)于至少100,000臺3 MW的風(fēng)輪機(jī)。隨著可再生能源呈現(xiàn)這種增長,加上國家電網(wǎng)的電力投入,風(fēng)輪機(jī)(WT)裝置的可靠運(yùn)行已成為工業(yè)和政府結(jié)構(gòu)著重研究的課題。對WT可靠性的量化研究顯示,可靠性隨時(shí)間不斷提升。例如,2016年美國國家可再生能源實(shí)驗(yàn)室報(bào)告2 顯示,在2007年至2013年間,包括變速箱在內(nèi)的大多數(shù)WT子系統(tǒng)的可靠性都得到了提高,變速箱停機(jī)時(shí)間縮短了7倍。但是,在2018年,變速箱仍然是三大常見故障點(diǎn)之一,且材料成本最高。2,3 變速箱每次故障的平均成本最高,一次大型更換平均花費(fèi)€230,000。4
變速箱組件的可靠性相對較差,因此需要重點(diǎn)對齒輪、軸承和軸實(shí)施狀態(tài)監(jiān)控。除了變速箱之外,轉(zhuǎn)子葉片和發(fā)電機(jī)是WT系統(tǒng)中 故障率最高的組件。5,6 目前商用風(fēng)輪機(jī)狀態(tài)監(jiān)控系統(tǒng)有很多,其中大部分使用振動傳感器來實(shí)施變速箱分析。目前已經(jīng)有一些 商用的轉(zhuǎn)子葉片監(jiān)控系統(tǒng) 7 ,但這個領(lǐng)域尚待繼續(xù)研究。大量相關(guān)資料支持在風(fēng)輪機(jī)中使用振動監(jiān)控系統(tǒng),包括詳細(xì)調(diào)查和分 析各種系統(tǒng)的優(yōu)勢。8 但很少有資料會介紹風(fēng)輪機(jī)應(yīng)用對振動傳感器的要求。本文從系統(tǒng)角度,提供關(guān)于風(fēng)輪機(jī)組件、故障統(tǒng)計(jì)、 常見故障類型和故障數(shù)據(jù)收集方法等的見解。本文從WT組件上的常見故障入手,討論振動傳感器要求,例如帶寬、測量范圍和噪聲密度等。
系統(tǒng)組件、故障和傳感器要求
圖1和圖2顯示風(fēng)輪機(jī)系統(tǒng)的主要組件,并提供風(fēng)輪機(jī)變速箱的詳細(xì)結(jié)構(gòu)。下面幾節(jié)將重點(diǎn)介紹變速箱、葉片和塔架對狀態(tài)監(jiān) 控的要求,重點(diǎn)介紹振動傳感器。對于其他系統(tǒng),例如偏航驅(qū)動、機(jī)械剎車和發(fā)電機(jī),我們一般不使用振動傳感器進(jìn)行監(jiān)控,而是監(jiān)控扭矩、溫度、潤滑油參數(shù)和電信號。
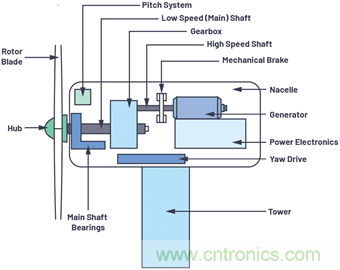
圖1. 風(fēng)輪機(jī)系統(tǒng)組件。
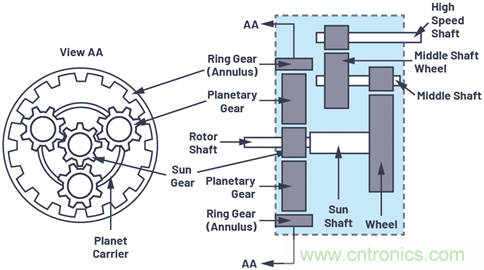
圖2. 變速箱的結(jié)構(gòu)。
變速箱
風(fēng)輪機(jī)變速箱將機(jī)械能從低轉(zhuǎn)速的轉(zhuǎn)子輪轂傳輸?shù)礁咚侔l(fā)電機(jī)。同時(shí),WT變速箱承受著不同風(fēng)速帶來的交替載荷,以及頻 繁制動導(dǎo)致的瞬變脈沖。變速箱包括一個低速轉(zhuǎn)子軸和主軸承,在風(fēng)力驅(qū)動轉(zhuǎn)子葉片時(shí)以0 rpm至20 rpm(不到0.3 Hz)的轉(zhuǎn)速運(yùn) 行。要捕獲不斷增加的振動信號,需要振動傳感器使用直流電運(yùn)行。行業(yè)認(rèn)證指南特別指出,振動傳感器的性能需要達(dá)到0.1 Hz。9 變速箱的高速軸通常以3200 rpm (53 Hz)的轉(zhuǎn)速運(yùn)行。為了提供足夠帶寬來捕捉軸承和齒輪故障的諧波,推薦低速和高速軸振動傳感器的性能達(dá)到10 kHz及以上。9 這是因?yàn)闊o論轉(zhuǎn)速多大,軸承諧振一般都在幾千赫范圍內(nèi)。10
到目前為止,軸承故障是引發(fā)變速箱故障的最大原因。一些研究表明,軸承故障是引發(fā)災(zāi)難性齒輪故障的根本原因。 11 當(dāng)高速軸上的后軸承失效時(shí),高速軸發(fā)生傾斜,造成中間(中部)軸齒輪的傳輸不均。在這種情況下,齒輪的接觸齒極易發(fā)生故障,如圖3所示。

圖3. 中軸齒輪斷齒。
軸承潤滑(油)不足是導(dǎo)致主軸軸承故障的主要原因??捎玫慕鉀Q方案(例如SKF NoWear)包括特殊軸承涂層, 12 可將缺油運(yùn)行時(shí)間提高6倍以上。
即使采用特殊的軸承涂層和其他變速箱改進(jìn)方法,我們?nèi)匀恍枰褂煤线m的振動傳感器來監(jiān)控變速箱的主要軸承和高速軸承。振 動傳感器的本底噪聲需要足夠低,以便能夠檢測到早期振動幅度(g范圍)較低的軸承故障。較老的MEMS技術(shù),例如ADXL001 ,其本底噪聲為4 mg/√Hz,足以捕捉軸承外環(huán)的故障。13 圖4顯示,外環(huán)故障先出現(xiàn)約0.055 g的頻率峰值,且軸承表現(xiàn)良好,從噪聲密度角度來看,本底噪聲低于2 mg/√Hz。參考的13數(shù)據(jù)采集系統(tǒng)的過程增益導(dǎo)致噪聲大幅降低,因此測量得出2 mg/√Hz本底噪聲。只有在DAQ 系統(tǒng)實(shí)現(xiàn)了足夠的過程增益,且噪聲為隨機(jī)的情況下,才適合使用本底噪聲為4 mg/√Hz的傳感器。一般情況下,最好使用本底噪聲 為100 µg/√Hz至200 µg/√Hz的振動傳感器,而不是基于過程增益,后者只有在噪聲為隨機(jī)且不相關(guān)的情況下適用。
本底噪聲在100 µg/√Hz至200 µg/√Hz之間的傳感器在捕捉正常的軸承運(yùn)行狀況方面表現(xiàn)出色,在捕捉mg/√Hz范圍內(nèi)的早期故障時(shí)則 表現(xiàn)卓異。事實(shí)上,使用本底噪聲為100 µg/√Hz的MEMS傳感器甚至能夠更早檢測出軸承故障。
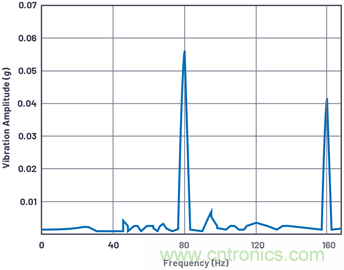
圖4. 使用MEMS加速度計(jì)ADXL001測量軸承外環(huán)的故障。
在不到0.1 g時(shí),顯示初始軸承損壞,而在達(dá)到1 g時(shí),通常表示深度 軸承損壞,這會觸發(fā)維護(hù)。 14 圖5顯示,當(dāng)振動幅值超過6 g時(shí),需維護(hù)變速箱和更換軸承。如前所述,軸承故障頻率會在更高頻率下 發(fā)生。在更高頻率下實(shí)施測量需要使用g范圍規(guī)格更大的傳感器。這是因?yàn)闇y得的加速度重力值與頻率成比例。因此,與在低頻率下 相比,在更高頻率下,相同的少量故障位移會導(dǎo)致更高的重力范圍。一般指定在50 g至200 g時(shí)使用測量范圍高達(dá)10 kHz、更高帶寬的傳感 器,尤其指定適用于風(fēng)輪機(jī)應(yīng)用.由于結(jié)構(gòu)沖擊或突然的機(jī)械斷裂,振動傳感器也需要涵蓋沖擊載荷工況。因此,一般將典型的商用振動監(jiān)控系統(tǒng)的滿量程定為至少為50 g至100 g。
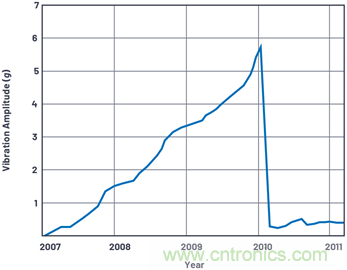
圖5. 振動幅度為6 g時(shí)的軸承位移。
對于風(fēng)輪機(jī)主軸承,要求至少使用一個單軸振動傳感器,推薦使用兩個,并在軸向和徑向上測量。 9 軸承環(huán)上的軸向開裂可能使軸 承壽命縮短至僅一到兩年。15
由于變速箱本身很復(fù)雜,如圖2所示,所以建議使用至少6個振動傳感器來實(shí)施狀態(tài)監(jiān)控。 9 在選擇傳感器的數(shù)量和位置時(shí),應(yīng)確保能夠可靠測量所有齒輪嚙合和缺陷/轉(zhuǎn)動頻率。監(jiān)控變速箱的 低速級時(shí),需要使用一個單軸傳感器,放置在盡可能靠近環(huán)形齒輪的位置。監(jiān)控變速箱的中間和高速級時(shí),需要在中心齒輪、 中間軸和高速軸位置使用一個單軸傳感器。高速和中速軸承內(nèi)環(huán)的軸向開裂已成為影響風(fēng)輪機(jī)變速箱壽命的主要原因。15
對于變速箱監(jiān)控,未來要改善的狀態(tài)監(jiān)控領(lǐng)域包括無線振動監(jiān)控系統(tǒng)的采用,但持續(xù)研究才能持續(xù)為這些解決方案提供支持。8
轉(zhuǎn)子葉片
風(fēng)輪機(jī)的轉(zhuǎn)子葉片和輪轂組件在低速下捕捉風(fēng)并傳輸扭矩。導(dǎo)致葉片故障的主要原因包括極端風(fēng)荷載、結(jié)冰或雷電等環(huán)境 影響,以及不平衡。這些因素導(dǎo)致斷裂和邊緣開裂,以及徑節(jié)系統(tǒng)故障。目前只有少量商用振動監(jiān)控系統(tǒng),可以分布在葉片外部和內(nèi)部。 8 已經(jīng)使用MEMS振動傳感器在葉片上開展大量學(xué)術(shù)研究,比如Cooperman和Martinez的工作, 16 其中還包括陀螺儀和磁力儀。我們使用這些傳感器的聯(lián)合輸出來確定風(fēng)輪機(jī)葉片的方向和變形。相比之下,很少有商用振動監(jiān)控系 Weidmuller BLADEcontrol®,17 ,它使用每個轉(zhuǎn)子葉片內(nèi)的振動傳感器來測量每個葉片的自動振動行為的變化。BL ADEcontrol系統(tǒng)主要用于檢測引起渦輪過度振動的轉(zhuǎn)子葉片上的極端結(jié)冰狀況。
一般來說,大型風(fēng)輪機(jī)葉片(即直徑40米以上的葉片)的首級固有頻率在0.5 Hz至15 Hz之間。 18 對渦輪葉片 18 上的無線振動監(jiān)控系統(tǒng)的可行性研究顯示,因振動激勵導(dǎo)致的葉片頻率響應(yīng)遠(yuǎn)高于基頻。其他研究 19 表明,由葉片邊緣變形引起的葉片頻率與葉片扭轉(zhuǎn)變形引起的葉片頻率之間有顯著差異。葉片邊緣變形的固有頻率在0.5 Hz至30 Hz之間,葉片扭轉(zhuǎn)變形的固有頻率高達(dá)700 Hz。用振動傳感器測量基頻以外的頻率需要更大的帶寬。DNVGL狀態(tài)監(jiān)控規(guī)范認(rèn)證9建議對轉(zhuǎn)子葉片使用振動傳感器,它能夠測量0.1 Hz至≥10 kHz的頻率范圍,其中一個傳感器放在轉(zhuǎn)子軸上,另一個放在橫向方向上。振動傳感器在轉(zhuǎn)子葉片上可以實(shí)現(xiàn)高頻率測量范圍,它也必須具備至少50 g的大幅度測量范圍,與變速箱軸承的要求類似。
帶風(fēng)機(jī)的塔
風(fēng)輪機(jī)塔為風(fēng)機(jī)外殼和轉(zhuǎn)子葉片總成提供結(jié)構(gòu)支撐。塔身會遭受沖擊損壞,導(dǎo)致塔出現(xiàn)傾斜。塔傾斜之后,葉片與風(fēng)向之間無法保持最佳角度。測量傾斜度需要使用操作功率可以低至0 Hz的傳感器,如此在零風(fēng)條件下,也可以檢測到傾斜。
基座部分的結(jié)構(gòu)破壞會導(dǎo)致塔搖晃。塔搖晃監(jiān)控集成在一些渦輪狀態(tài)監(jiān)控系統(tǒng)中,與變速箱振動監(jiān)控相比,可以商用的選項(xiàng)并不多。 8 Scaime狀態(tài)監(jiān)控系統(tǒng) 20 使用加速度計(jì)、位移傳感器、應(yīng)變傳感器和溫度傳感器來監(jiān)控葉片、塔和基座的狀況。根據(jù)DNVGL規(guī)范,Scaime加速度計(jì)的滿量程范圍為±2 g, 20 監(jiān)控頻率范圍為0.1 Hz至100 Hz。 9如前所述,在靜態(tài)條件下(無風(fēng)力),當(dāng)塔架結(jié)構(gòu)發(fā)生故障導(dǎo)致傾斜時(shí),頻率的最低限值降低至0 Hz。要實(shí)施傾斜測量,需要使用具有良好的直流穩(wěn)定性能的傳感器。MEMS傳感器,例如ADXL355采 用氣密封裝,可以實(shí)現(xiàn)行業(yè)領(lǐng)先的0 g失調(diào)穩(wěn)定性。
研究 21 證實(shí),最小±2 g范圍的振動傳感器足以對塔實(shí)施監(jiān)控。在正常運(yùn)行模式下,25 mps的最大風(fēng)速可產(chǎn)生小于1 g的加速度重力電平。事實(shí)上,在"基于現(xiàn)場測量和有限元分析的風(fēng)輪機(jī)塔基礎(chǔ)系統(tǒng)可識別應(yīng)力狀態(tài)" 21 研究中,額定風(fēng)速為2 mps到25 mps,風(fēng)輪機(jī)會在風(fēng)速為25 mps時(shí)關(guān)斷(停用)。
總結(jié)
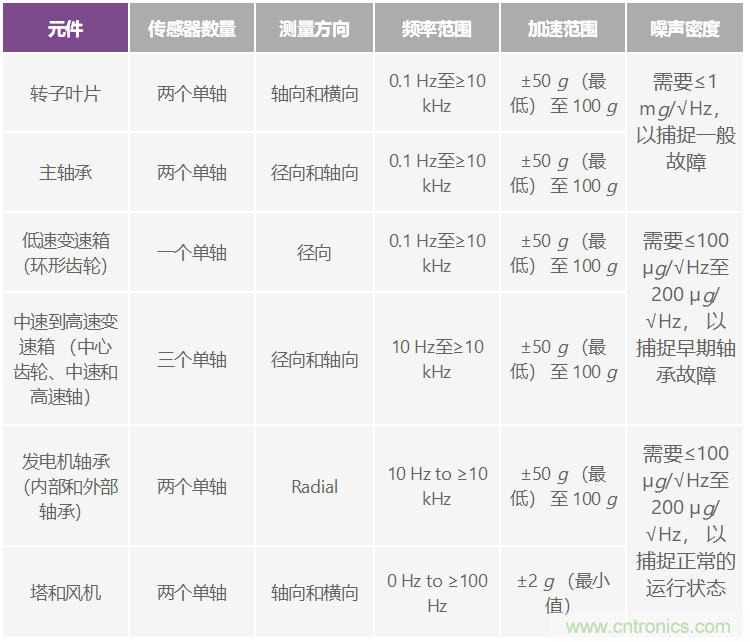
表1基于風(fēng)輪機(jī)應(yīng)用需求提供振動傳感器的需求摘要。DNVGL狀態(tài)監(jiān)控規(guī)范認(rèn)證中給出了傳感器的數(shù)量、測量方向和頻率范圍。 9 如 前所述,0 Hz性能對于監(jiān)控塔架的結(jié)構(gòu)問題非常重要。表1還根據(jù)本文提供的現(xiàn)場研究和測量總結(jié)了合適的幅度范圍和噪聲密度。
表1. 風(fēng)輪機(jī)狀態(tài)監(jiān)控對振動傳感器的要求
故障數(shù)據(jù)收集方法
所有大規(guī)模實(shí)體WT都有標(biāo)準(zhǔn)的監(jiān)控控制和數(shù)據(jù)采集(SCADA)系統(tǒng),主要用于實(shí)施參數(shù)監(jiān)控。監(jiān)控參數(shù)的示例包括變速箱軸承溫度和潤滑、主動功率輸出和相電流。一些參考資料 6 討論使用SCADA數(shù)據(jù)進(jìn)行風(fēng)輪機(jī)狀態(tài)監(jiān)控,以檢測趨勢。英國杜倫大學(xué)的一項(xiàng)調(diào)查 7 列出了多達(dá)10個商用狀態(tài)監(jiān)控系統(tǒng),這些系統(tǒng)可以適配并與使用標(biāo)準(zhǔn)協(xié)議的現(xiàn)有SCADA系統(tǒng)完全集成。GE Energy ADAPT.Wind就是這樣一個示例。 22 對未來技術(shù)趨勢的廣泛調(diào)查 7 顯示,在風(fēng)輪機(jī)上安裝振動監(jiān)控系統(tǒng)是一個明顯的傾向。
用于風(fēng)輪機(jī)狀態(tài)監(jiān)控的合適的振動傳感器
在等于或低于0.3 Hz時(shí),壓電振動技術(shù)難以或無法捕獲振動特征。這意味著無法對低速WT部件,例如轉(zhuǎn)子葉片、主軸承、低速變速箱,塔等實(shí)施正常監(jiān)控?;贛EMS的傳感器的性能可以低至0 Hz,可以捕捉所有主要風(fēng)輪機(jī)組件中的關(guān)鍵故障。這為客戶提供了用 于WT的單一振動傳感器解決方案,僅使用MEMS來測量從0 Hz到高達(dá)10 kHz及以上的故障。

除了能夠捕捉所有關(guān)鍵故障之外,MEMS還具有以下優(yōu)點(diǎn):
● 寬重力測量范圍和超低的µg/√Hz噪聲密度,可以輕松滿足表1中給出的要求。
● MEMS具有內(nèi)置自測(BIST)功能。系統(tǒng)操作員無需訪問WT來測試/確保傳感器正確運(yùn)行,可以節(jié)約成本。相比之下,壓電技術(shù)不具備BIST功能。
● 與基于壓電的解決方案相比,MEMS接口在數(shù)據(jù)接口和電源供應(yīng)方面更加靈活。在將高阻抗壓電傳感器輸出解譯到長電纜 時(shí),可用的選項(xiàng)有限。最常采用的是雙線IEPE接口,使用第二根接地線通過共享電源/數(shù)據(jù)線為壓電傳感器供電。IEPE使用與壓電解決方案匹配的放大器來提供低阻抗電纜驅(qū)動解決方案。IEPE接口解決方案可以使用MEMS傳感器,但MEMS傳感器也能與使用現(xiàn)場總線(RS-485、CAN)或基于以太網(wǎng)的網(wǎng)絡(luò)操作的現(xiàn)有系統(tǒng)輕松集成。這是因?yàn)镸EMS傳感器可以提供模擬輸出或數(shù)字輸出(SPI、IC),并輕松傳輸至其他協(xié)議。
● 環(huán)保性能:WT通常在-40?C到+55?C的溫度下運(yùn)行,而MEMS器件很容易滿足這一要求。
● 與基于壓電的傳感器相比,MEMS在長時(shí)間使用時(shí)具有更好的靈敏度和線性度。ADI加速度計(jì)的非線性程度很低,通??梢?忽略不計(jì)。例如, ADXL1001 MEMS加速度計(jì)在滿量程范圍內(nèi)具有小于0.025%的典型非線性規(guī)格。相比之下,對基于壓電傳感器的標(biāo)準(zhǔn)化測量的學(xué)術(shù)研究顯示,非線性度為0.5%或更低。23
如今可用的基于MEMS的振動傳感器和解決方案
傳感器
使用 ADXL1002、 ADXL1003、 ADXL1005、 和 ADcmXL3021 MEMS傳感器(如圖2 所示)可以輕松滿足風(fēng)輪機(jī)應(yīng)用的振動監(jiān)控對帶寬、范圍和噪 聲密度的要求。 ADXL355 和 ADXL357 也適合用于實(shí)施風(fēng)輪機(jī)塔監(jiān)控, 具有較低的帶寬和范圍測量性能。
ADXL355/ADXL357具有良好的直流穩(wěn)定性,這對于測量風(fēng)輪機(jī)塔的傾斜度非常重要。ADXL355/ ADXL357的氣密封裝保證了良好的長期穩(wěn)定性。在10年使用壽命中,ADXL355的重復(fù)性在±3.5 mg以內(nèi),為傾斜測量提供了高度精準(zhǔn)的 傳感器。
表2. 用于風(fēng)輪機(jī)狀態(tài)監(jiān)控的合適的MEMS傳感器

風(fēng)輪機(jī)狀態(tài)監(jiān)控解決方案
無線
ADI提供一套完整的驗(yàn)證參考設(shè)計(jì)、評估系統(tǒng)和即插即用機(jī)器健康傳感器模塊,以加速客戶的設(shè)計(jì)進(jìn)度。圖6顯示ADI無線振動監(jiān)控評估平臺。 該系統(tǒng)解決方案整合了機(jī)械附件、硬件、固件和PC軟件,可以快速部署和評估單軸振動監(jiān)測解決方案。該模塊可以通過磁性方式或螺柱直接連接到電機(jī)或固定裝置。作為基于狀態(tài)的監(jiān)控(CbM)系統(tǒng)的一部分,它也可以與同一無線Mesh網(wǎng)絡(luò)上的其他模塊組合使用,以提供具有多個傳感器節(jié)點(diǎn)的范圍更廣的圖像。

圖6. 無線振動監(jiān)控評估平臺。
CbM硬件信號鏈包含一個安裝在模塊底座上的單軸ADXL1002加 速度計(jì)。將ADXL1002的輸出讀入 ADuCM4050低功耗微控制器,并在此對其進(jìn)行緩沖,轉(zhuǎn)換至頻域并傳輸至SmartMesh® IP終端。將ADXL1002的輸出從SmartMesh芯片無線傳輸?shù)絊martMesh IP管理器。管理器連接到PC,可以進(jìn)行可視化處理和數(shù)據(jù)保存。數(shù)據(jù)顯示為原始時(shí)域數(shù)據(jù)和FFT數(shù)據(jù)。還提供了有關(guān)時(shí)間匯總數(shù)據(jù)的其他摘要統(tǒng)計(jì)信息。提供了PC端GUI的完整Python®代碼以及部署于模塊上的C語言固件,以便客戶修改。
有線
ADI的 Pioneer 1有線CbM評估平臺 為 ADcmXL3021 三軸振動傳感器提 供工業(yè)有線鏈接解決方案。CbM硬件信號鏈由三軸ADcmXL3021加速度計(jì)和Hirose flex PCB連接器組成。帶有SPI和中斷輸出的ADcmXL3021 Hirose連接器與接口PCB相連,通過數(shù)米長的電纜將發(fā)送至RS-485物理層的SPI轉(zhuǎn)化發(fā)送至遠(yuǎn)程主控制器板。SPI到RS-485 物理層的轉(zhuǎn)換可以使用隔離或非隔離的接口PCB實(shí)現(xiàn),其中包括 iCoupler® 隔離 (ADuM5401/ADuM110N)和RS-485/RS-422收發(fā)器(ADM4168E/ADM3066E)。該解決方案通過一根標(biāo)準(zhǔn)電纜將電能和數(shù)據(jù)結(jié)合在一起,從而降低了遠(yuǎn)程MEMS傳感器節(jié)點(diǎn)的電纜和連接器成本。專用軟件GUI可以簡單配置ADcmXL3021器件,并在長電纜上捕捉振動數(shù)據(jù)。GUI軟件將數(shù)據(jù)可視化顯示為原始時(shí)間域或FFT波形。

圖7. 有線振動監(jiān)控評估平臺。
結(jié)論
本文證明基于MEMS的傳感器可以測量風(fēng)輪機(jī)的關(guān)鍵系統(tǒng)中的所有關(guān)鍵故障。MEMS傳感器的帶寬、測量范圍、直流穩(wěn)定性和噪聲 密度均妥善指定,在風(fēng)輪機(jī)應(yīng)用中具有出色性能。
MEMS內(nèi)置自測(BIST)、靈活的模擬/數(shù)字接口,以及長時(shí)間使用過程中的出色的靈敏度/線性度,這是MEMS傳感器成為最佳風(fēng)輪機(jī) 狀態(tài)監(jiān)控解決方案的另外一些原因?;谡駝訖z測早期故障的維護(hù)系統(tǒng)是一項(xiàng)現(xiàn)代技術(shù),可以防止整個風(fēng)輪機(jī)出現(xiàn)成本高昂的停機(jī)。
參考電路
1 2018年全球風(fēng)能報(bào)告。 GWEC,2019年4月。
2 Shuangwen (Shawn) Sheng。 "風(fēng)輪機(jī)變速箱可靠性數(shù)據(jù)庫、狀態(tài)監(jiān)控,以及運(yùn)行和維護(hù)研究更新。" Drivetrain Reliability Collaborative Workshop,2016年5月。
3 Alexios Koltsidopoulos Papatzimos, Tariq Dawood, and Phillip R. Thies。 "從 海上風(fēng)輪機(jī)變速箱更換得出的數(shù)據(jù)洞察。" EERA DeepWind 的2018年第15屆深海海上風(fēng)力研發(fā)大會, 物理學(xué)報(bào):系列會議 ,2018年10月。
4 James Carroll, Alasdair McDonald, and David McMillan。"海上風(fēng)輪機(jī)的故障率、維修時(shí)間和計(jì)劃外的O&M成本分析。" 風(fēng)能 ,2015年8月。
5 Yao Li, Caichao Zhu, Chaosheng Song, and Jianjun Tan。 "風(fēng)輪機(jī)可靠性 的研究和開發(fā)。" 國際機(jī)械工程與應(yīng)用雜志, 2018年。
6 Jannis Tautz-Weinert and Simon J. Watson。 "使用SCADA數(shù)據(jù)實(shí)施風(fēng)輪機(jī)狀態(tài)監(jiān)控 — 社論。" IET Renewable Power Generation ,第11卷第4期,2017年5月。
7 Christopher J. Crabtree, D. Zappala, and P.J. Tavner。 對可商用的風(fēng)輪機(jī)狀態(tài)監(jiān)控系統(tǒng)的調(diào)查. Durham Research Online ,英國杜倫大學(xué),2014年5月。
8 Mathew L. Wymore, Jeremy E. Van Dam, Halil Ceylan, and Daji Qiao。 "對 風(fēng)輪機(jī)健康狀態(tài)監(jiān)控系統(tǒng)的調(diào)查。" 可再生和可持續(xù)能源審查 ,第52卷,2015年12月。
9 DNVGL-SE-0439服務(wù)規(guī)范:狀態(tài)監(jiān)控認(rèn)證。DNVGL,2016年6月。
10 Robert Bond Randall。 基于振動的狀態(tài)監(jiān)控:工業(yè)、航空航天和汽車應(yīng)用。,2010年12月。
11 Wei Teng, Xian Ding, Xiaolong Zhang, Yibing Liu, and Zhiyong Ma。 基于復(fù)雜的子波轉(zhuǎn)換的風(fēng)輪機(jī)變速箱的多故障檢測與故障分析。 可再生能源 ,第93卷,2016年8月。
12 David de Garavilla and Dr. Xiaobo Zhou。 延長風(fēng)輪機(jī)中的主軸軸承的使用壽命。 風(fēng)力發(fā)電工程與發(fā)展,2019年8月。
13 Eric Bechhoefer, Mathew Wadham-Gagnon, and Bruno Boucher。 關(guān)于風(fēng)輪 機(jī)的初次狀態(tài)監(jiān)控體驗(yàn)。 預(yù)測和健康管理學(xué)會年會,2012年。
14 Xavier Escaler and Toufik Mebarki。"滿量程風(fēng)輪機(jī)振動特征分析," 機(jī)械 ,2018年。
15 Nic Sharpley。 "了解風(fēng)輪機(jī)變速箱軸承軸向開裂的根本原因。" 風(fēng)力發(fā)電工程與發(fā)展,2014年4月。
16 Aubryn M. Cooperman and Marcias J. Martinez。 "用于對風(fēng)輪機(jī)葉片實(shí)施結(jié)構(gòu)健康監(jiān)控的MEMS。" 會期:適應(yīng)性結(jié)構(gòu)與技術(shù)國際會議 (ICAST 2014),2014年10月。
17 BLADEcontrol。 Weidmüller Interface GmbH & Co. KG,2020年2月。
18 O.O. Esu, S.D. Lloyd, J.A.Flint, and S.J. Watson。"適合風(fēng)輪機(jī)葉片的全自動 無線監(jiān)控系統(tǒng)的可行性。" 可再生能源 ,第97卷,2016年11月。
19 L.K. Tartibu, M. Kilfoil, and A.J. Van Der Merwe。 "長度可變的葉片風(fēng)輪機(jī)的振動分析。" 國際工程與技術(shù)進(jìn)展雜志 ,2012年7。
20 風(fēng)能。Scaime,2020年2月。
21 Chikako Fujiyama, Kaoru Yonetsu, Takuya Maeshima, and Yasuhiro Koda。 "基于現(xiàn)場測量和有限元分析的風(fēng)輪機(jī)塔基礎(chǔ)系統(tǒng)可識別應(yīng)力狀態(tài)。" Procedia Engineering ,第95卷,2014年12月。
22 "Bently Nevada ADAPT.Wind:狀態(tài)監(jiān)控解決方案。。"貝克休斯公司, 2019年11月。
23 J. Putner, P.B. Grams, and H. Fastl, "壓電加速度計(jì)的非線性行為。" 會期:Fortschritte der Akustik, AIA-DAGA 2013,2013年3月。
"對風(fēng)輪機(jī)結(jié)冰檢測系統(tǒng)的評估:最終報(bào)告 VGB研究項(xiàng)目編號392:最終報(bào)告。"METEOTEST,2016年2月。
Fischer, Katharina and Diego Coronado。 "VGB研究項(xiàng)目383— 風(fēng)輪機(jī)的狀態(tài)監(jiān)控:技術(shù)先進(jìn)性、用戶體驗(yàn)和推薦。" VGB PowerTech ,2015年7月。
Tchakoua, Pierre, Mohand Ouhrouche, René Wamkeue, and F. Slaoui Hasnaoui。 "風(fēng)輪機(jī)狀態(tài)監(jiān)控:技術(shù)先進(jìn)性評論、新趨勢和未來的挑戰(zhàn)。" Energies,2014年4月。
Wei, Teng, Feng Wang, Kaili Zhang, Yibing Liu, and Xian Ding。 "基于經(jīng)驗(yàn)?zāi)B(tài)分解的風(fēng)輪機(jī)變速箱點(diǎn)蝕故障檢測。" 機(jī)械工程學(xué)報(bào) ,2014年。
推薦閱讀:


