
【導(dǎo)讀】只有擁有一套優(yōu)秀的電池管理系統(tǒng)才能充分發(fā)揮新型鋰離子電池所具備的優(yōu)勢(shì)。主動(dòng)充電平衡系統(tǒng)的性能遠(yuǎn)遠(yuǎn)優(yōu)于傳統(tǒng)的被動(dòng)方法,而相對(duì)簡(jiǎn)單的變壓器則有助于保持較低的材料成本。本文就為大家講解鋰離子電池組的主動(dòng)充電平衡法。
位于慕尼黑的英飛凌科技公司汽車系統(tǒng)工程部門最近接到一項(xiàng)開發(fā)E-Cart的任務(wù)。E-Cart是一種可駕駛的車輛,主要用于演示混合動(dòng)力汽車的電氣性能。該車將采用一組龐大的鋰離子電池組提供動(dòng)力,當(dāng)時(shí)開發(fā)人員就意識(shí)到對(duì)其進(jìn)行帶充電平衡的電池管理是絕對(duì)必要的。這種情況下必須采用在各節(jié)電池之間進(jìn)行主動(dòng)能量轉(zhuǎn)移的方式來代替?zhèn)鹘y(tǒng)的簡(jiǎn)單充電平衡方案。他們開發(fā)的主動(dòng)充電平衡系統(tǒng)在材料成本與被動(dòng)方案相當(dāng)?shù)那闆r下能提供更優(yōu)秀的性能(見圖1)。
電池系統(tǒng)架構(gòu)
鎳鎘電池與隨后出現(xiàn)的鎳氫電池多年來一直主宰著電池市場(chǎng)。鋰離子電池是最近才進(jìn)入市場(chǎng)的,但由于其性能有極大提高,因此其市場(chǎng)份額增長(zhǎng)非常迅速。鋰離子電池的儲(chǔ)能容量非常驚人,但即便如此,單個(gè)電池單元的容量不論從電壓還是從電流方面仍都太低,不能滿足一個(gè)混合動(dòng)力發(fā)動(dòng)機(jī)的需要。并聯(lián)多個(gè)電池單元可以增大電池所提供的電流,串聯(lián)多個(gè)電池單元?jiǎng)t可以增大電池提供的電壓。
電池組裝商通常利用一些縮略短語來描述其電池產(chǎn)品,例如“3P50S”代表該電池組中有3個(gè)并聯(lián)的電池單元、50個(gè)串聯(lián)的電池單元。
模塊化結(jié)構(gòu)在對(duì)包含多個(gè)串聯(lián)電池單元的電池進(jìn)行管理時(shí)是很理想的結(jié)構(gòu)。例如,在一個(gè)3P12S的電池陣列中,每12個(gè)電池單元串聯(lián)之后就組成了一個(gè)模塊(block)。然后,這些電池單元就可通過一塊以微控制器為核心的電子電路對(duì)其進(jìn)行管理和平衡。
這樣一個(gè)電池模塊的輸出電壓取決于串聯(lián)電池單元的個(gè)數(shù)和每個(gè)電池單元的電壓。鋰離子電池單元的電壓通常在3.3V到3.6V之間,因此一個(gè)電池模塊的電壓約在30V到45V之間。
混合動(dòng)力車的驅(qū)動(dòng)需要450V左右的直流電源電壓。為了根據(jù)充電狀態(tài)來補(bǔ)償電池單元電壓的變化,比較合適的做法是在電池組和發(fā)動(dòng)機(jī)之間連接一個(gè)DC-DC轉(zhuǎn)換器。這個(gè)轉(zhuǎn)換器還可以限制電池組輸出的電流。
為確保DC-DC轉(zhuǎn)換器工作在最佳狀態(tài),要求電池組電壓在150V到300V之間。因此,需要串聯(lián)5到8個(gè)電池模塊。
平衡的必要性
如果電壓超出允許的范圍,鋰離子電池單元就很容易損壞(見圖2)。如果電壓超出了上、下限(以納米磷酸鹽型鋰離子電池為例,下限電壓為2V,上限電壓為3.6V),電池就可能出現(xiàn)不可逆轉(zhuǎn)的損壞。其結(jié)果至少是加快電池的自放電速度。電池輸出電壓在一個(gè)很寬的充電狀態(tài)(SOC)范圍內(nèi)都是穩(wěn)定的,電壓偏離安全范圍的風(fēng)險(xiǎn)很小。但在安全范圍的兩端,充電曲線的起伏相對(duì)比較陡峭。因此,為預(yù)防起見,必須嚴(yán)密監(jiān)控電壓。
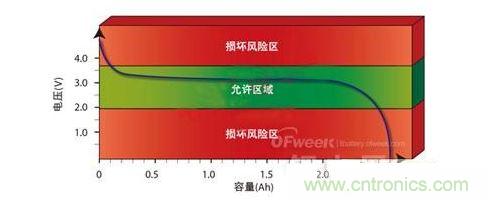
圖2:鋰離子電池的放電特性(鈉米磷酸鹽型)。
如果電壓達(dá)到一個(gè)臨界值,就必需立即停止放電或充電過程。在一個(gè)強(qiáng)大的平衡電路的幫助下,相關(guān)電池單元的電壓可以返回安全范圍內(nèi)。但為達(dá)到這一目的,該電路必需能在電池組中任何一個(gè)單元的電壓開始與其他單元出現(xiàn)差異時(shí)馬上在各單元之間轉(zhuǎn)移能量。
[page]
充電平衡法
1.傳統(tǒng)的被動(dòng)方法:在一般的電池管理系統(tǒng)中,每個(gè)電池單元都通過一個(gè)開關(guān)連接到一個(gè)負(fù)載電阻。這種被動(dòng)電路可以對(duì)個(gè)別被選中的單元放電。但該方法只適用于在充電模式下抑制最強(qiáng)電池單元的電壓攀升。為限制功耗,此類電路一般只允許以100mA左右的小電流放電,從而導(dǎo)致充電平衡耗時(shí)可高達(dá)幾小時(shí)。
2.主動(dòng)平衡法:相關(guān)資料中有很多種主動(dòng)平衡法,均需要一個(gè)用于轉(zhuǎn)移能量的存儲(chǔ)元件。如果用電容來做存儲(chǔ)元件,將其與所有電池單元相連就需要龐大的開關(guān)陣列。更有效的方法是將能量存儲(chǔ)在一個(gè)磁場(chǎng)中。該電路中的關(guān)鍵元件是一個(gè)變壓器。電路原型是由英飛凌的開發(fā)小組與VOGT電子元件GmbH公司共同開發(fā)的。其作用是:
a. 在電池單元之間轉(zhuǎn)移能量
b. 將多個(gè)單獨(dú)的電池單元電壓復(fù)接至一個(gè)基于地電壓的模數(shù)轉(zhuǎn)換器(ADC)輸入端
該電路是按照回掃變壓器原理構(gòu)造的。這類變壓器能夠?qū)⒛芰看鎯?chǔ)在磁場(chǎng)中。其鐵氧體磁心中的氣隙增大了磁阻,因此可以避免磁心材料出現(xiàn)磁飽和。
該變壓器兩側(cè)的電路是不同的:
a. 初級(jí)線圈與整個(gè)電池組相連
b. 次級(jí)線圈與每個(gè)電池單元相連
該變壓器的一種實(shí)用模型支持多達(dá)12個(gè)電池單元。變壓器的可能連接數(shù)量限制了電池單元的個(gè)數(shù)。上述原型變壓器有28個(gè)引腳。
其中的開關(guān)采用OptiMOS3系列的MOSFET,它們的導(dǎo)通電阻極低,因此其傳導(dǎo)損耗可以忽略不計(jì)(見圖3)。
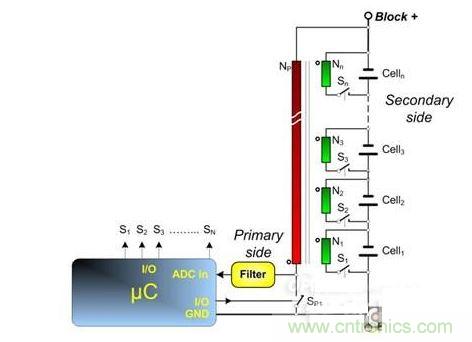
圖3:電池管理模塊的原理圖
圖中的每個(gè)模塊都受英飛凌公司的8位先進(jìn)微控制器XC886CLM控制。這種微控制器自帶閃存程序和一個(gè)32KB的數(shù)據(jù)存儲(chǔ)器。此外,它還有兩個(gè)基于硬件的CAN接口,支持通過公共汽車控制器局域網(wǎng)(CAN)總線協(xié)議與下面的處理器負(fù)載通信。它還包含一個(gè)基于硬件的乘除法單元,可用于加快計(jì)算過程。
平衡方法
由于變壓器可以雙向工作,因此我們可以根據(jù)情況采取兩種不同的平衡方法。在對(duì)所有電池單元進(jìn)行電壓掃描之后(電壓掃描的細(xì)節(jié)將在后面介紹),計(jì)算平均值,然后檢查電壓偏離平均值最大的電池單元。如果其電壓低于平均值,就采用底部平衡法(bottom-balancing),如果其電壓高于平均值,就采用頂部平衡法(top-balancing)。
1.底部平衡法:圖4所示例子就是采用的底部平衡法。掃描發(fā)現(xiàn)電池單元2是最弱的單元,必須對(duì)其進(jìn)行增強(qiáng)。
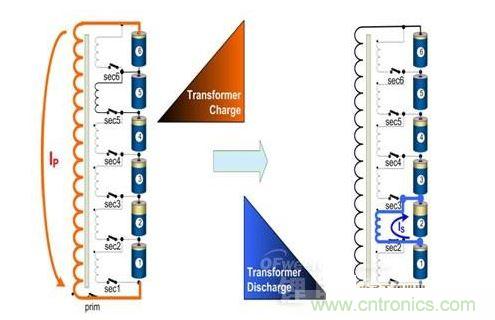
圖4:鋰離子電池的底部充電平衡原理
此時(shí)閉合主開關(guān)(“prim”),電池組開始對(duì)變壓器充電。主開關(guān)斷開后,變壓器存儲(chǔ)的能量就可以轉(zhuǎn)移至選定的電池單元。相應(yīng)的次級(jí)(“sec”)開關(guān)——在本例中是開關(guān)sec2——閉合后,就開始能量轉(zhuǎn)移。
[page]
每個(gè)周期均包含兩個(gè)主動(dòng)脈沖和一個(gè)暫停。在本例中,40毫秒的周期轉(zhuǎn)換為頻率就是25kHz。在設(shè)計(jì)變壓器時(shí),其工作頻段應(yīng)在20kHz以上,以避免出現(xiàn)人類聽覺頻率范圍內(nèi)可感知的嘯叫噪音。這種聲音是由變壓器鐵氧體磁心的磁致伸縮導(dǎo)致的。
尤其是當(dāng)某個(gè)電池單元的電壓已經(jīng)達(dá)到SoC的下限時(shí),底部平衡法能夠幫助延長(zhǎng)整個(gè)電池組的工作時(shí)間。只要電池組提供的電流低于平均平衡電流,車輛就能繼續(xù)工作,直到最后一塊電池單元也被耗盡。
2.頂部平衡法:如果某個(gè)電池單元的電壓高于其他單元,那么就需要將其中的能量導(dǎo)出,這在充電模式下尤其必要。如果不進(jìn)行平衡,充電過程在第一塊電池單元充滿之后就不得不立即停止。采用平衡之后則可以通過保持所有電池單元的電壓相等而避免發(fā)生過早停止充電的情況。
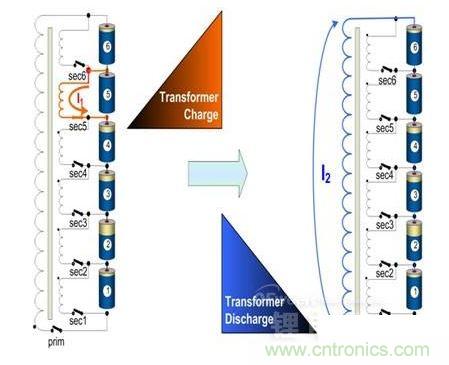
圖5:鋰離子電池的頂部充電平衡原理
圖5給出了頂部平衡模式下的能量流動(dòng)情況。在電壓掃描之后,發(fā)現(xiàn)電池單元5是整個(gè)電池組中電壓最高的單元。此時(shí)閉合開關(guān)sec5,電流從電池流向變壓器。由于自感的存在,電流隨時(shí)間線性增大。而由于自感是變壓器的一個(gè)固有特性,因此開關(guān)的導(dǎo)通時(shí)間就決定了能夠達(dá)到的最大電流值。電池單元中轉(zhuǎn)移出的能量以磁場(chǎng)的形式得到存儲(chǔ)。在開關(guān)sec5斷開后,必須閉合主開關(guān)。此時(shí),變壓器就從儲(chǔ)能模式進(jìn)入了能量輸出模式。能量通過巨大的初級(jí)線圈送入整個(gè)電池組。
頂部平衡法中的電流和時(shí)序條件與底部平衡法非常類似,只是順序和電流的方向與底部平衡法相反。
平衡功率和電壓掃描
按照英飛凌E-Cart中的原型配置,平均平衡電流可達(dá)5A,比被動(dòng)平衡法的電流高50倍。在5A的平衡電流下,整個(gè)模塊的功耗僅2W,因此無需專門的冷卻措施,并且進(jìn)一步改善了系統(tǒng)的能量平衡。
為了管理每個(gè)電池單元的充電狀態(tài),必須測(cè)量它們各自的電壓。由于只有單元1在微控制器的ADC范圍內(nèi),因此模塊中其他單元的電壓無法直接測(cè)量。一種可能的方案是采用一組差分放大器陣列,而且它們必須支持整個(gè)電池模塊的電壓。
下文中描述的方法只需增加很少量的額外硬件就能測(cè)量所有電池單元的電壓。在該方法中,主要任務(wù)是進(jìn)行充電平衡的變壓器同時(shí)也被用做一個(gè)復(fù)用器。
在電壓掃描模式中沒有使用變壓器的回掃模式。當(dāng)S1到Sn這些開關(guān)中有一個(gè)閉合時(shí),與其相連的電池單元的電壓就轉(zhuǎn)換到變壓器的所有繞組中。
在經(jīng)過一個(gè)離散濾波器的簡(jiǎn)單預(yù)處理之后,被測(cè)信號(hào)就被送入微控制器的ADC輸入端口。開關(guān)S1到Sn中的某個(gè)開關(guān)閉合時(shí)所產(chǎn)生的測(cè)量脈沖持續(xù)時(shí)間可能非常短,實(shí)際導(dǎo)通時(shí)間為4us。因此,通過這個(gè)脈沖存儲(chǔ)至變壓器中的能量很少。而且無論如何在開關(guān)斷開之后,存儲(chǔ)在磁場(chǎng)中的能量都會(huì)通過初級(jí)晶體管流回整個(gè)電池模塊。因此電池模塊的能量多少并不受影響。在對(duì)所有電池單元進(jìn)行完一個(gè)周期的掃描之后,系統(tǒng)又回到初始狀態(tài)。
本文小結(jié)
只有擁有一套優(yōu)秀的電池管理系統(tǒng)才能充分發(fā)揮新型鋰離子電池所具備的優(yōu)勢(shì)。主動(dòng)充電平衡系統(tǒng)的性能遠(yuǎn)遠(yuǎn)優(yōu)于傳統(tǒng)的被動(dòng)方法,而相對(duì)簡(jiǎn)單的變壓器則有助于保持較低的材料成本。

