
【導讀】任何涉及電源完整性的討論都會把大量重點放在目標阻抗和平坦阻抗要求概念上。但我們怎樣才能設計出具有平坦阻抗特性的電壓調(diào)節(jié)器模塊(VRM)呢?本文除了討論這個特定問題外,還將介紹如何在不到5s的時間內(nèi)完成這個設計。你信么?反正我是信了。
假設你還沒有計算要求的目標阻抗值,因為這是這個設計問題中的難點。如果你已經(jīng)知道設計目標阻抗,那么你很幸運,因為你已進入“不到……”這一步,可以直接到第二步。我知道你很是懷疑,但既然這只是一個5s的設計,我希望你能對我耐心點,你會發(fā)現(xiàn)我是認真的。雖然需要花點時間解釋這個過程,但最終我會向你展示如何在不到5s的時間內(nèi)完成整個過程。
使用電流模式或電流模式仿真拓撲可以極大地方便設計過程,而且可以減少控制環(huán)路的復雜性。雖然有許多器件可供選擇,但本文將TI公司的LM25116作為例子,不僅因為我手頭有它的評估板,而且因為這個特殊的評估板只需要最少量的修改就能實現(xiàn)想要的平坦阻抗。LM25116是一種仿真的峰值電流模式控制器,也包含要求的斜率補償和電流波形斜率。使用一個簡單、容易計算的電容就能進行這些功能設定。
這個設計過程只需一次簡單的2端口阻抗測量就能驗證阻抗的平坦性,當然還有其它多種簡單測量方法值得推薦。最終設計在搭建完成后還可以方便地使用片狀元件微調(diào)阻抗進行優(yōu)化,本文也對為何有必要做這種微調(diào)進行了討論。
確定目標阻抗
假定你了解VRM的電壓和電流要求,那就可以使用典型的目標阻抗計算值確定VRM的輸出阻抗。
拿12V輸入、3.3V/10A輸出VRM要求作為例子,目標阻抗的計算公式是:

這是最大可允許的阻抗。為了允許元件容差,并為開關紋波和動態(tài)負載要求提供足夠的裕量,目標阻抗一般被設定得低得多。最差情況分析確保不會超過最大值。在這個例子中,標稱的設計目標阻抗被設為14mΩ,部分原因是為了盡量減少對評估板的修改,因為這個修改有些難度。
最關鍵的步驟
至此我們已經(jīng)完成了大半的電壓調(diào)節(jié)器模塊(VRM)設計,還需要一次計算來確定基本的VRM特性——跨導。電流模式轉(zhuǎn)換器是最簡單的實現(xiàn)方式,因為它能被表示為跨導方塊。VRM的輸出阻抗與跨導(Gfs)直接相關,關系式是:
因為我們已知目標阻抗,所以可以根據(jù)這個公式算出Gfs。
簡單的計算可以證明,這個解可以生成無限頻率范圍內(nèi)的理想阻抗。圖1是仿真原理圖,圖2是仿真得到的輸出阻抗。
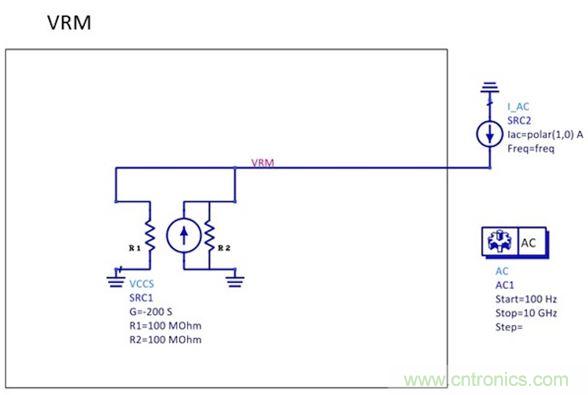
圖1:70A/V的跨導源與負反饋連接在一起(注意SRC1中的負號)。SRC2是一種交流信號,用于監(jiān)視與頻率有關的輸出阻抗。
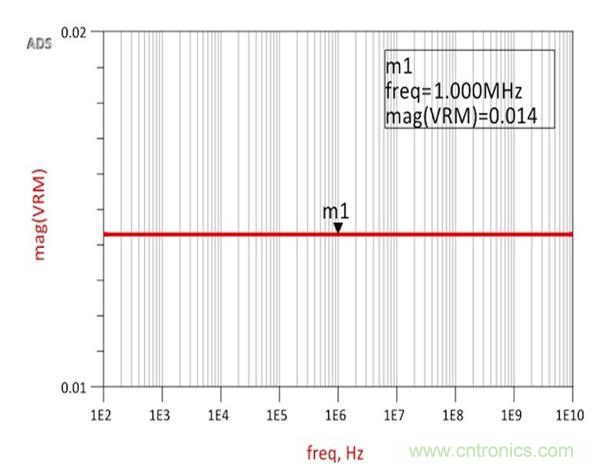
圖2:仿真結(jié)果展示了與承諾一樣完全平坦的14mΩ阻抗,從而確認了阻抗和跨導之間的關系。
在理想世界中,電壓調(diào)節(jié)器模塊(VRM)設計真的就這么簡單,到此已經(jīng)設計完畢。但在現(xiàn)實世界中,存在一些局限和限制因素,需要再多做一些功課來解決。我們可以在幾分鐘內(nèi)完成實際的設計,或在幾秒內(nèi)用仿真器自動完成這個設計過程。
實際局限性
應對這些局限性的設計過程非常簡單:
1.確定要求的輸出阻抗和有效串聯(lián)電阻(ESR),并選擇電容;
2.確定功率級跨導(通常根據(jù)電流極限、RDSon或DCR);
3.確定誤差放大器增益和極點頻率;
4.確定輸出電感;
5.確定電流模式仿真設計時的斜坡電容,或標準電流模式控制下的斜率補償;
6.測量輸出阻抗,必要時進行微調(diào)。
我們已經(jīng)確定,VRM要求70的跨導以提供14mΩ的阻抗。第一個問題是控制環(huán)路帶寬不能是無限的,因此必須限制為一個實際的帶寬。為了避免在開關頻率附近發(fā)生奇怪的行為,該頻率的實際限值是開關頻率的1/10至1/6。在超出這個帶寬時,電容控制阻抗,因此電容的等效串聯(lián)電阻(ESR)等于目標阻抗,我們這個例子中為14mΩ。
輸出電容
開關頻率明顯是折中的結(jié)果,因為更高的開關頻率可以導致更小的電容和電感,但也會導致更高的損耗。電容阻抗被設為取得單位增益帶寬,因此交越頻率點的電容電抗和跨導的乘積必須等于單位1。

由于我們已經(jīng)確定,跨導是目標阻抗的倒數(shù),因此我們可以將交越頻率設在開關頻率的1/10和1/6之間。

為了方便起見,保留評估板上已經(jīng)使用的250kHz設置。由于想要的目標阻抗是14mΩ,所以要求的總電容在270uF和450uF之間,等效串聯(lián)電阻(ESR)應接近14mΩ。最終我們選擇了單個330uF/15mΩ電容(KEMET T520D337M006ATE015)。根據(jù)公式3計算交越頻率的結(jié)果大約為35kHz,正好在開關頻率的1/10和1/6之間。
功率級
總跨導是誤差放大器增益和功率級跨導的乘積。功率級跨導通常根據(jù)確立的電流極限確定。在一些實現(xiàn)中,MOSFET的RDSon或輸出電感的DCR被用來檢測電流,在這種情況下這些特性定義了功率級跨導。
LM25116評估板的功率級跨導由10mΩ的電流檢測電阻(R11)和電流檢測放大器增益(10)設定,并滿足10A的電流極限。最終的功率級跨導等于:
這是測量有好處的地方之一,因為這些低值電流檢測電阻并不總是表里如一的。使用四線歐姆表測量到的R11在線電阻約為12mΩ,導致功率級跨導減小為8.3。通過測量作為負載電流函數(shù)的誤差放大器輸出電壓可以驗證實際的跨導。圖3顯示了測量結(jié)果和擬合的趨勢線。注意電流極限由于這個增加的電阻而稍低于10A,但為了方便起見仍保留了這個電阻,因為更換電阻有點困難。
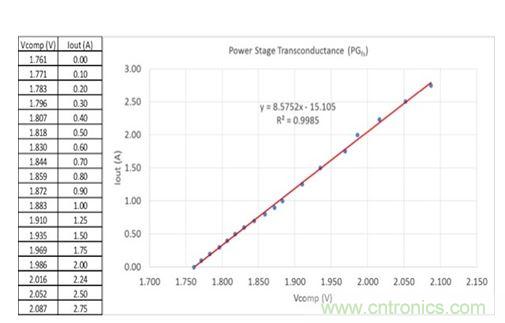
圖3:在評估板上測量得到的誤差放大器輸出電壓與輸出電流關系。曲線擬合趨勢線指示跨導為8.6,接近于用四線歐姆計獲得的值。
誤差放大器和補償
在確定功率級跨導和總跨導值后,就可以確定誤差放大器增益了:

評估原理圖中與誤差放大器有關的部分如圖4所示。
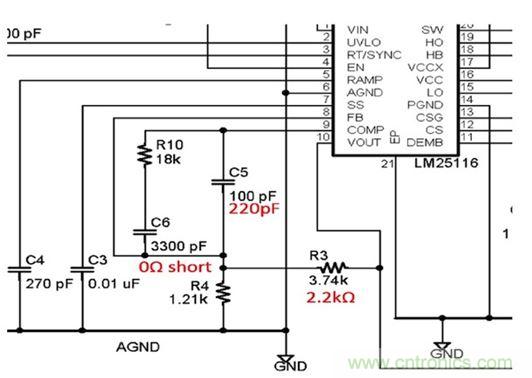
圖4:評估板部分原理圖顯示必須調(diào)整分壓器(R3和R4)將輸出電壓從5V改變到3.3V。另外還有其它多處改變。
為了獲得平坦的阻抗特性,要求改變幾個元件。具體來說,為了調(diào)整5V輸出使其在0A時接近3.37V、并在5A的平均電流時輸出3.3V,必須改變電阻R3。電容C6要用一個0Ω的電阻短路,因為我們要的不是低頻恢復,而是平坦阻抗。C5也可能要求修改,以消除輸出電容的ESR產(chǎn)生的零點。
首先,將R3從3.74KΩ改變?yōu)?.2KΩ,得到想要的3.37V輸出。然后由R10和R3的比值確定誤差放大器增益。
由于安裝好的R10值非常接近18kΩ,因此可以保持不變。C5的選擇原則是利用R3和C5形成的極點抵消輸出電容和ESR組成的零點。
由于必須刪除原始的100pF電容,我測量到安裝C5的空白焊盤處電容為20pF,因此需要安裝236pF的電容。最終裝上了220pF電容。
輸出電感
雖然輸出電感并不是影響輸出阻抗的主要因素,但使用合適的值也非常重要。電感值與紋波電流之間的關系是:
評估板使用的是6uH的電感,雖然可以減小到4.7uH,但更換起來比較困難。因此這個6uH電感被保留了下來。
模擬的電流模式控制也要求做一個斜坡出來,以便重構(gòu)電感電流斜率。這個電容就是圖4中的C4。
對于LM25116來說,斜坡充電電流是5uA,C4值可以這樣計算:
已安裝值是220pF,雖然可以安裝240pF,但兩者已經(jīng)相當接近,因此保留原樣不變。
最終模型和仿真
最終仿真模型可以做到控制環(huán)路穩(wěn)定性、小信號交流阻抗以及大小信號瞬態(tài)響應結(jié)果的仿真(見圖5)。
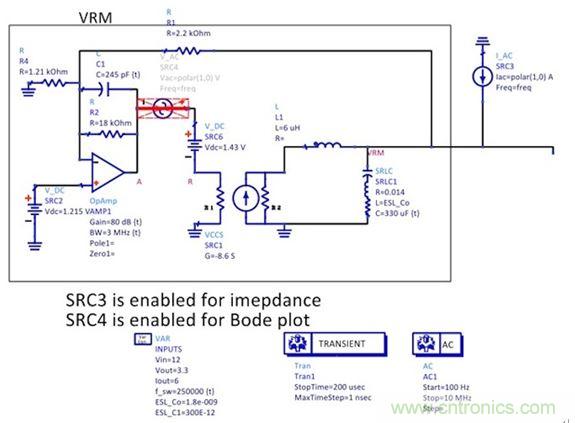
圖5:簡化后的狀態(tài)空間平均模型顯示了誤差放大器電路、功率級跨導和輸出電容。
對原始評估板設計(藍色)和平坦阻抗設計(紅色)仿真得到的阻抗如圖6所示。結(jié)果阻抗是14mΩ,跟期望的一樣相當平坦。
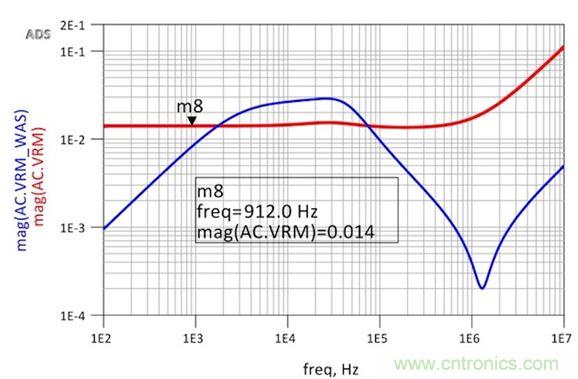
圖6:修改后的VRM阻抗仿真顯示出非常平坦的響應和1.8nH的超額電感。用于仿真目的的簡單VRM模型就是14mΩ加1.8nH。
測量得到的阻抗也相當平坦,均在理想的14mΩ阻抗值附近。低頻值可以用電阻R10進行微調(diào),而60kHz附近的少許阻抗峰可以用C5進行微調(diào)。在250kHz處的少許凹陷是由于ESR稍小引起的??梢允褂肊SR稍高一點的電容改善這個范圍內(nèi)的平坦度。這里顯示的平坦度對幾乎所有電源分配網(wǎng)絡(PDN)應用來說都足夠了。
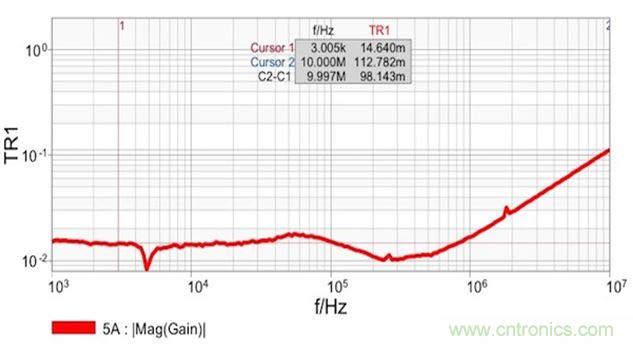
圖7:雙端口阻抗測量結(jié)果顯示 在14mΩ和1.8nH電感時具有平坦響應。這個電感值是從10MHz時的112mΩ計算得到的。

因此許多信號完整性(SI)仿真器要求的簡單L-R模型是13mΩ和1.8nH。減小這個電感的一種方法是并聯(lián)多個電容。電容的電感值基本上獨立于電容值,更多的與外殼尺寸有關。將兩個相同系列的150uF 35mΩ電容并聯(lián)在一起可以將電感值減小到約1nH,如果用100uF 45mΩ的電容則可以得到700pH的電感。而且并聯(lián)較小的電容成本通常也不高,只是需要占用更多的PCB面積。
一般還要用去耦電容來減小使用點的電感,但這種去耦電路并不是VRM的典型部分。
將網(wǎng)絡分析儀端口1的電纜移動到50Ω任意波形發(fā)生器(AWG)輸出端,將分析儀端口2的電纜移動到50Ω通道示波器輸入端,即可將雙端口阻抗測量轉(zhuǎn)換到時域進行。圖8顯示了平均階躍響應(紅色)和開關紋波(黃色)。方形部分確認了平坦的阻抗特性。邊緣有點圓是因為ESR有點低造成的(見圖8)。
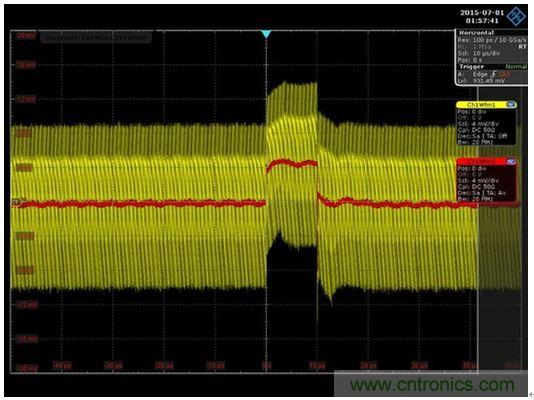
圖8:通過將網(wǎng)絡分析儀替換為一條AWG電纜和一臺示波器就可以得到時域響應。紅色代表平均響應,紋波包含在黃色軌跡中。
本文小結(jié)
我們成功地通過修改評估板設計產(chǎn)生了想要的14mΩ平坦阻抗。雖然解釋這個過程花的時間超過了5s,但這個過程很容易自動化,只需把設計要求作為輸入,并允許其它項在仿真器中或使用電子表格自動確定。表1所示的電子表格可以根據(jù)設計輸入計算每個參數(shù)。每個結(jié)論都可以被覆蓋。舉例來說,計算得到的目標阻抗最大值是33mΩ,這也被輸入進可以被覆蓋的設定目標阻抗單元格。
表1所示的電子表格接受綠色的輸入設計參數(shù),然后計算剩余的參數(shù)。
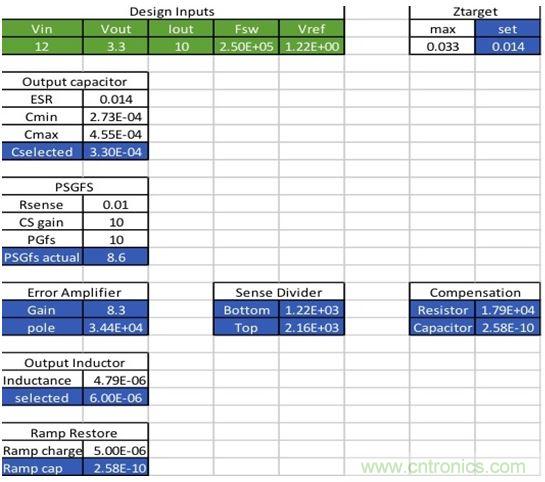
表1
最小電容和最大電容限值也是計算出來的,而最終入選值還可供選擇,選定值再用于剩下的計算。這些覆蓋值也允許其它輸入,包括PGFS和輸出電感。重要的是,這些決定和選擇要按此順序進行。



