
【導(dǎo)讀】通過將可編程序控制器應(yīng)用于發(fā)動機(jī)起動程序控制系統(tǒng)中,可以極大地改善控制系統(tǒng)的性能,不僅使系統(tǒng)的控制精度提高、抗干擾能力增強(qiáng),而且使系統(tǒng)還具有體積小、重量輕、耗電省、通用性強(qiáng)等優(yōu)點(diǎn)。
傳統(tǒng)的軍民用飛機(jī)的發(fā)動機(jī)起動程序控制系統(tǒng)普遍采用機(jī)電相結(jié)合的方式,由于采用機(jī)電式的定時機(jī)構(gòu)去控制相關(guān)的繼電器、接觸器以實(shí)現(xiàn)發(fā)動機(jī)起動程序控制,不僅使控制系統(tǒng)的體積增大、重量加重、耗電多、可靠性差,而且采用固定接線的硬件設(shè)計使系統(tǒng)不具有通用性,更突出的問題是由于機(jī)械磨損還會使系統(tǒng)的控制精度逐漸降低。由于PLC把計算機(jī)的編程靈活、功能齊全、應(yīng)用面廣等優(yōu)點(diǎn)與繼電器系統(tǒng)的控制簡單、使用方便、抗干擾能力強(qiáng)等優(yōu)點(diǎn)結(jié)合起來,而其本身又具有體積小、重量輕、耗電省等優(yōu)點(diǎn),因此,用PLC取代機(jī)電式的定時機(jī)構(gòu)來完成發(fā)動機(jī)的起動程序控制,將極大地改善發(fā)動機(jī)起動控制系統(tǒng)的性能。
一.發(fā)動機(jī)起動程序控制原理
發(fā)動機(jī)由靜止?fàn)顟B(tài)轉(zhuǎn)變到能自行發(fā)出功率的最低轉(zhuǎn)速狀態(tài)叫發(fā)動機(jī)的起動。為了使發(fā)動機(jī)渦輪(轉(zhuǎn)子)能由靜止?fàn)顟B(tài)柔和地、無撞擊地轉(zhuǎn)動起來,定時機(jī)構(gòu)必須對起動機(jī)的起動轉(zhuǎn)矩進(jìn)行分級調(diào)節(jié),使起動機(jī)的轉(zhuǎn)矩逐級增大,并適時地控制對發(fā)動機(jī)燃燒室進(jìn)行噴油點(diǎn)火。某型飛機(jī)發(fā)動機(jī)的起動程序控制原理如圖1所示。
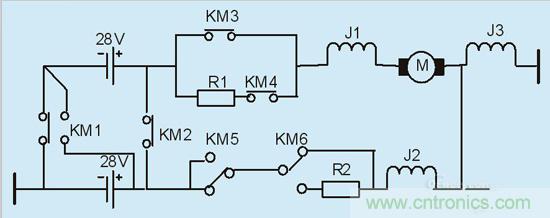
圖1.發(fā)動機(jī)的起動程序控制原理
定時機(jī)構(gòu)的程序控制把起動機(jī)的工作過程劃分為以下幾個階段:
第一階段:即按下起動按鈕后的1S~3.6S內(nèi),使起動機(jī)以復(fù)勵狀態(tài)且電樞串聯(lián)起動降壓電阻工作,起動機(jī)轉(zhuǎn)矩被限制在很小的范圍內(nèi),因此,起動機(jī)能柔和地通過
傳動裝置帶動發(fā)動機(jī)渦輪旋轉(zhuǎn)。
第二階段:即按下起動按鈕后的3.6S~9S內(nèi),短接起動降壓電阻,起動機(jī)兩端電壓升高,起動機(jī)轉(zhuǎn)矩迅速增大,隨之渦輪轉(zhuǎn)速迅速上升。
第三階段:即按下起動按鈕后的9S~15S內(nèi),起動電源車內(nèi)的兩組電瓶由并聯(lián)轉(zhuǎn)為串聯(lián),起動機(jī)兩端的電壓由28V升高到56V,起動機(jī)轉(zhuǎn)矩急劇增大,從而使渦輪轉(zhuǎn)速急劇上升。
第四階段:即按下起動按鈕后的15S~22S內(nèi),起動機(jī)并勵線圈串聯(lián)降壓電阻使起動機(jī)的激磁磁通減小,反電勢減小,電樞電流增大,轉(zhuǎn)矩又一次增大,從而使渦輪進(jìn)一步加速。
二.PLC控制系統(tǒng)
1.系統(tǒng)硬件設(shè)計及I/O地址的分配
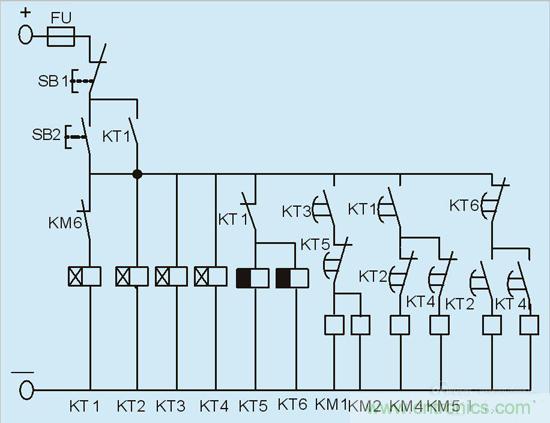
圖2.發(fā)動機(jī)起動程序電氣控制線路圖
在發(fā)動機(jī)起動機(jī)程序控制系統(tǒng)中PLC采用三菱FX2系列中的FX2N-48MR-001型,該系列PLC可靠性高,抗干擾能力強(qiáng),適合于在軍民用飛機(jī)上使用,且配置靈活,性價比高[1]。從圖1 中可以看出:為了實(shí)現(xiàn)起動機(jī)的四個階段控制,自按下起動按鈕起,接觸器KM1、KM2的吸合時間均為9S~21S,KM3為3.6S~22S,KM4為1S~3.6S,KM5為1S~15S,KM6為15S~22S,根據(jù)系統(tǒng)的控制要求,PLC控制系統(tǒng)需引入與停止按鈕和起動按鈕分別相對應(yīng)的兩個輸入繼電器、與四個接觸器和兩個繼電器分別相對應(yīng)的六個輸出繼電器、以及控制上述四個接觸器和兩個繼電器分時段工作的四個通電延時時間繼電器和兩個斷電延時時間繼電器。發(fā)動機(jī)起動程序電氣控制線路圖和PLC的I/O地址編碼表分別如圖2、表1所示。
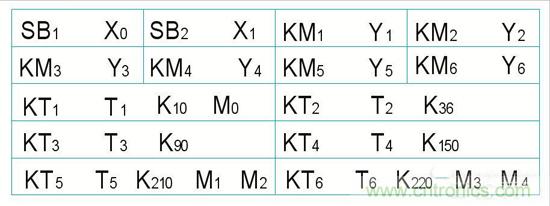
表1.I/O地址編碼表
2.軟件設(shè)計

圖3.控制系統(tǒng)梯形圖
軟件設(shè)計采用使用最廣泛的PLC梯形圖圖形編程語言。梯形圖與繼電器控制系統(tǒng)的電路圖很相似,直觀易懂,很容易被熟悉電器控制的電氣人員掌握,特別適用于開關(guān)量邏輯控制[2]。該控制系統(tǒng)梯形圖如圖3所示。
圖3中:X0、X1為輸入繼電器;Y1、Y2、Y3、Y4、Y5、Y6為輸出繼電器;T1、T2、T3、T4為通電延時時間繼電器;T5、T6為斷電延時時間繼電器;M0、M1、M2、M3、M4為中間繼電器。
三.結(jié)束語
通過將可編程序控制器應(yīng)用于發(fā)動機(jī)起動程序控制系統(tǒng)中,可以極大地改善控制系統(tǒng)的性能,不僅使系統(tǒng)的控制精度提高、抗干擾能力增強(qiáng),而且使系統(tǒng)還具有體積小、重量輕、耗電省、通用性強(qiáng)等優(yōu)點(diǎn)。



