
【導(dǎo)讀】零極點補償器常用于修正反饋放大器回路的幅度和相位。這篇文章超出了教科書標(biāo)準(zhǔn)的解釋程度,本文主要介紹了無緣補償器和有源補償器的原理和應(yīng)用場景,也考慮了工程師在使用補償器設(shè)計電路時需要注意的地方,甚至還涉及了補償器設(shè)計所采用晶體管的細節(jié)。
零極點補償器(Pole-zero compensator)常用于修正反饋放大器回路的幅度和相位。這篇文章超出了教科書標(biāo)準(zhǔn)的解釋程度,本文考慮了工程師在使用補償器設(shè)計電路時需要注意的地方,甚至還涉及了補償器設(shè)計所采用晶體管的細節(jié)。
無源補償器
零極點補償器可以是超前-滯后或滯后-超前補償器。它們經(jīng)常出現(xiàn)在電路和控制理論教科書中。最常見的無源電路補償器有三個器件:兩個電阻和一個電容。圖1所示的電路放置在放大器內(nèi)方便的位置,尤其是在反饋回路中,以提供額外的相位或高頻幅度“加重”。
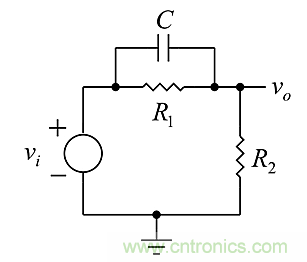
圖1:典型的無源電路補償器。
該電路本質(zhì)上是個RC分頻器,增加了與C并聯(lián)的電阻R1。R1、C組合的阻抗為:
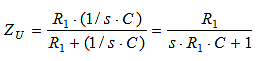
那么,傳遞函數(shù)就是分壓器公式:
第一個因子是準(zhǔn)靜態(tài)(0 + Hz)增益,即沒有C的分壓器。動態(tài)或頻率相關(guān)因子在ωz =–1/R1C處有一個零點;在ωp =–1/(R1 || R2)C處有一個極點。
當(dāng)使用波特(Bode)或頻率響應(yīng)圖時,使用頻率ω的大小(即其絕對值),負號被丟棄。
但是,請記住,波特圖上的極點和零點頻率不是正極點和零點——通常不是,但如果是的話,它們在圖示上仍然是正的。
由于并聯(lián)電阻的阻值比R1低,所以它們也具有較低的時間常數(shù)和較高頻率。極點頻率比零點高。
隨著頻率從低值開始增加,零點開始在低于ωz約十分之一的地方產(chǎn)生正向(超前)相位,它以45o/dec的線性增加,直到ωz為+ 45°。然后再高十倍,達到+90o;其在ωz的每一側(cè)都有十倍的相位影響。
類似,極點在ωp周圍有±10倍的相位相等范圍,但在ωp的每一側(cè)以–45o/dec線性地貢獻負(滯后)相位。在ωp,極點的相位貢獻是–45o。(極點或零點相位線性近似的最大誤差約為±6o。)
如果ωp > ωz超過二十倍,則極點與零點之間不存在相位的相互作用,可以實現(xiàn)從零點開始的完整的+ 90°相位。
零點相位超前位于回路增益幅度||GH||=1附近,位于回路的橫向或單位增益或交叉頻率fT處。
對于||GH||< 1,回路沒有足夠的反饋幅度(與正弦波幅度相同)來維持振蕩。
反饋電路中的常見問題是相位滯后或延遲過大,以及回路周圍的相移(回路增益GH)太接近-180°(-π,以弧度表示)?;芈分刑砑友a償器以加大正相位。這增加了相位裕度,即給定頻率與-180°(回路振蕩處)之間的回路相位差。
因此,一般的反饋設(shè)計目標(biāo)是在fT處將回路相位保持在-180°以上,以實現(xiàn)正相位裕度。
理想情況下,補償器只應(yīng)貢獻零點而沒有極點,但實際的模擬電路總是產(chǎn)生不少于零點的極點。(在系統(tǒng)級,通過并聯(lián)電路、有方法可以規(guī)避這種情況,例如在PID補償器中。而在柏拉圖式的理想DSP世界中,可以無極點地編程零點,但不能實時實現(xiàn)!)
超前-滯后補償器有一個不需要的極點伴隨著所需的零點。使用該電路進行補償設(shè)計的挑戰(zhàn)是將零點放置在需要額外(正)相位的位置,同時將極點放置在對回路動態(tài)性能無關(guān)宏旨的較高頻率處,高于fT十倍以上是不錯的選擇。
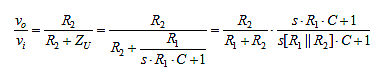
為分離極點和零點,必須通過使R2 < < R1來分開時間常數(shù)。然而,這也使得分頻器準(zhǔn)靜態(tài)增益 < < 1。是利是弊,取決于回路。對于由準(zhǔn)靜態(tài)回路增益太大導(dǎo)致振蕩(或循環(huán)過度)的回路,GH0不僅會產(chǎn)生零點增加相位,而且由分頻器引起的GH0的減小會使波特幅度曲線向下。因幅度隨頻率下降,fT經(jīng)由移動到圖2中左側(cè)(如圖2所示)而降低——下降到相位延遲不那么大且回路更穩(wěn)定的位置。
圖2:使用補償器后的波特圖變化。
另一方面,如果回路的極點太多,但又必須保持回路增益以滿足精度(準(zhǔn)靜態(tài)誤差)要求,則超前-滯后補償器不是合適的補救措施。 零點可以用來消除不需要的極點,但頻率更高的補償器極點仍存在。
實際上,補償器只是將回路極點轉(zhuǎn)移到更高頻率,盡管不超過十倍。 這有時太過微不足道。
因此,當(dāng)額外的零點和減小的準(zhǔn)靜態(tài)增益都有利于控制時,最好使用超前-滯后補償器。
雙無源和有源補償器
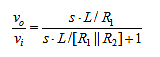
接著反饋回路的零極點補償器繼續(xù)講,并提出了一些教科書中通??床坏降姆椒?。 雙(dual)RC超前-滯后補償器是RL超前-滯后補償器,如下所示,其傳遞函數(shù)為:

不采用并聯(lián)-R極點,雙重補償器采用串聯(lián)-R極點、時間常數(shù)τp=L/(R1+R2);而零點時間常數(shù)為τz = L/(R2)。極點的串聯(lián)-R大于零點的,在時間常數(shù)的分母中,極點頻率較大:對于RC超前-滯后電路,ωp>ωz。
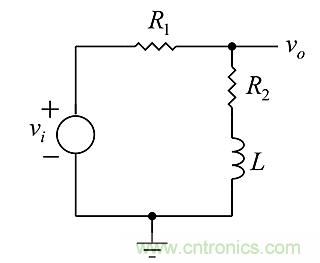
圖3:雙重補償器電路圖。
用電容來實現(xiàn)電路通常比用電感更合適,但有個有趣的例外:即當(dāng)電感由晶體管和電阻合成時,如圖4所示。
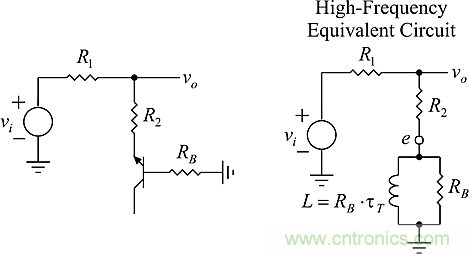
圖4:電感由晶體管和電阻合成的補償器及其高頻等效電路。
在fβ(β(s)開始滾降)和fT(β(s)=1)之間,是晶體管的高頻(hf)區(qū)域,其中基極阻抗在發(fā)射極旋轉(zhuǎn)+ 90°。
在該hf區(qū)域中的基極電阻RB采用如右側(cè)所示的等效電路(并聯(lián)RL),其中電感值取決于BJT的速度(由fT表示),并在表述L的公式中用作τT,其中τT = 1/ωT = 1/2 x π x fT。
該等效電路可方便地用于在高頻區(qū)補償?shù)某?滯后補償器。它與L被RB分流的無源版本不同。
當(dāng)為傳遞函數(shù)求解該hf等效電路時:
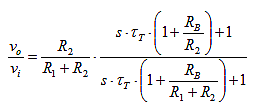
該電路有一個零點和一個極點,極點/零點頻率之比為:
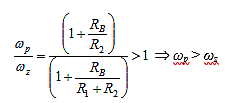
通過R1>>R2分開極點和零點。(接近或在同一頻率上的極點和零點是雙重點(doublet))。其對準(zhǔn)靜態(tài)增益產(chǎn)生的效果與對無源電路的相同。RB影響極點和零點的位置,并在頻率上移動極點和零點。極點和零點被限制在高頻區(qū)域,或者當(dāng)回轉(zhuǎn)(gyration)停止在該區(qū)域之外時,L“消失”。在fβ以下,僅為RB/(β0+1)。
該主題的一個變化如下所示,采用了并聯(lián)L、R2,而非串聯(lián)。
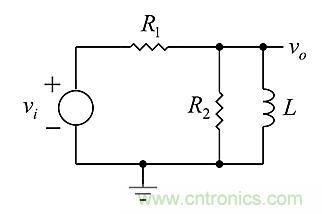
圖5:變化后的補償器電路。
RL超前-滯后補償器的傳遞函數(shù)為:
它與RC補償器在形式上的類似處在于都具有并聯(lián)-R極點,不同處在于在原點(origin)有零點。零點和極點頻率分別為ωz=–1/(L/R1)和ωp=–L/[R1||R2];其中零點頻率是零點增益達到一時的頻率。利用了相同的一般考慮。
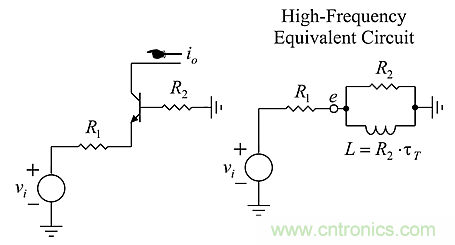
圖6:有源補償器及其高頻等效電路。
滯后-超前補償器通過安置ωp<ωz以降低低頻下的回路增益,然后當(dāng)fT接近以-1雙對數(shù)斜率穿越fT的平穩(wěn)過渡時,將幅度響應(yīng)從零點展開(flare out)。相同的有源器件電感合成可用于合成有源滯后-超前電路。
推薦閱讀:


