

【導(dǎo)讀】無(wú)線傳感器網(wǎng)絡(luò)(Wireless Sensor Network, WSN)具有信息采集、傳輸、處理的功能和動(dòng)態(tài)的拓?fù)浣Y(jié)構(gòu)。微小型傳感器節(jié)點(diǎn)具有計(jì)算能力、通信能力,將其部署在監(jiān)控區(qū)域內(nèi),構(gòu)成可以自主完成自組織特定任務(wù)的WSN智能網(wǎng)絡(luò)信息系統(tǒng),無(wú)線傳感器節(jié)點(diǎn)在監(jiān)控區(qū)域內(nèi)實(shí)現(xiàn)自定位。
為了實(shí)現(xiàn)無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)內(nèi)部、節(jié)點(diǎn)與節(jié)點(diǎn)之間的有效通信,在采用Atmel公司的ATZB-900-B0在無(wú)線通信硬件模塊和IEEE 802.15.4 MAC協(xié)議棧的基礎(chǔ)上,根據(jù)定位網(wǎng)絡(luò)的應(yīng)用需求以及數(shù)據(jù)命令的用途,制定節(jié)點(diǎn)消息格式、消息類型和消息內(nèi)容,明確消息的具體走向,確定節(jié)點(diǎn)的應(yīng)用層框架結(jié)構(gòu)。通過(guò)超聲波相關(guān)的測(cè)距定位算法來(lái)對(duì)網(wǎng)絡(luò)節(jié)點(diǎn)的測(cè)距性能和定位系統(tǒng)性能進(jìn)行實(shí)驗(yàn)分析。定位實(shí)驗(yàn)結(jié)果表明,節(jié)點(diǎn)的平均定位誤差為0.27m,最大定位誤差為0.76m。
引言
無(wú)線傳感器網(wǎng)絡(luò)(Wireless Sensor Network, WSN)具有信息采集、傳輸、處理的功能和動(dòng)態(tài)的拓?fù)浣Y(jié)構(gòu)。微小型傳感器節(jié)點(diǎn)具有計(jì)算能力、通信能力,將其部署在監(jiān)控區(qū)域內(nèi),構(gòu)成可以自主完成自組織特定任務(wù)的WSN智能網(wǎng)絡(luò)信息系統(tǒng),無(wú)線傳感器節(jié)點(diǎn)在監(jiān)控區(qū)域內(nèi)實(shí)現(xiàn)自定位。無(wú)線傳感器節(jié)點(diǎn)不僅要能夠?qū)崿F(xiàn)自身定位,還要能夠在監(jiān)控區(qū)域內(nèi)出現(xiàn)入侵者時(shí),有效地安排適當(dāng)?shù)墓?jié)點(diǎn)來(lái)消滅入侵者,起到自主防御的作用。
當(dāng)前,國(guó)內(nèi)外的高校、科研機(jī)構(gòu)以及其他組織已經(jīng)開(kāi)發(fā)出很多成熟的WSN定位系統(tǒng)。如Active Badge、Active Bat系統(tǒng)、AHLos系統(tǒng)、SpiderBat系統(tǒng)等。其中,國(guó)內(nèi)關(guān)于定位方法和技術(shù)的研究比較多,國(guó)外的研究開(kāi)展的比較早,很多定位系統(tǒng)已經(jīng)走出實(shí)驗(yàn)室,投入商業(yè)化應(yīng)用。但仍存在節(jié)點(diǎn)測(cè)距范圍有限、定位精度不高等關(guān)鍵技術(shù)問(wèn)題。目前,常用的定位技術(shù)主要是基于紅外測(cè)距、RSSI檢測(cè)、聲波以及超聲波測(cè)距的定位技術(shù),主要是室內(nèi)環(huán)境中應(yīng)用。紅外信號(hào)的穿透性差,容易受到環(huán)境因素的影響,傳輸距離短,需要大量的傳感器節(jié)點(diǎn),定位系統(tǒng)的成本較高。因此,在完成測(cè)距定位的同時(shí),開(kāi)發(fā)一個(gè)簡(jiǎn)單實(shí)用、操作便捷的定位監(jiān)控系統(tǒng)也非常重要。
針對(duì)上述問(wèn)題,本文以節(jié)點(diǎn)高精度系統(tǒng)定位為目標(biāo),研究基于DSP的相關(guān)定位技術(shù),設(shè)計(jì)并實(shí)現(xiàn)了基于超聲波相關(guān)檢測(cè)定位系統(tǒng),系統(tǒng)界面友好,可以為WSN提供更好的節(jié)點(diǎn)自身定位服務(wù)支持。
一.定位系統(tǒng)結(jié)構(gòu)
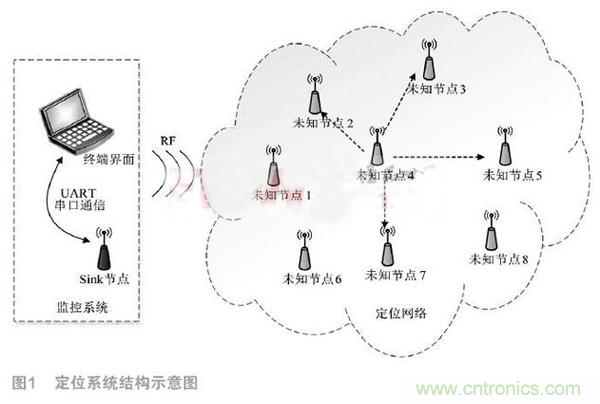
根據(jù)定位系統(tǒng)的實(shí)際要求,設(shè)計(jì)了WSN定位系統(tǒng),系統(tǒng)的基本結(jié)構(gòu)如圖1所示。該系統(tǒng)主要由兩部分組成:定位網(wǎng)絡(luò)和監(jiān)控系統(tǒng)。定位網(wǎng)絡(luò)中節(jié)點(diǎn)的位置隨機(jī)進(jìn)行部署,其位置不確定,節(jié)點(diǎn)通過(guò)超聲波相關(guān)測(cè)距技術(shù),使用相關(guān)檢測(cè)算法計(jì)算節(jié)點(diǎn)之間的距離,通過(guò)無(wú)線方式將距離信息轉(zhuǎn)發(fā)傳遞至Sink節(jié)點(diǎn)。上位機(jī)監(jiān)控系統(tǒng)部分又分為Sink節(jié)點(diǎn)信息處理和終端界面顯示兩個(gè)子部分,Sink節(jié)點(diǎn)根據(jù)收集到的節(jié)點(diǎn)距離信息來(lái)計(jì)算節(jié)點(diǎn)的坐標(biāo)位置,終端界面顯示網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)及節(jié)點(diǎn)坐標(biāo)。
1.傳感器節(jié)點(diǎn)架構(gòu)
根據(jù)具體應(yīng)用場(chǎng)景的不同,節(jié)點(diǎn)的總體框架主要由DSP、RAM、ATZB-900-B0無(wú)線傳輸模塊、射頻收發(fā)天線、溫度測(cè)量模塊、A/D采樣模塊、超聲波收發(fā)電路以及電源模塊組成。本設(shè)計(jì)中無(wú)線數(shù)據(jù)通信模塊選用Atmel公司的ATZB-900-B0模塊,它是一個(gè)靈敏度高、功耗低、超緊湊型的IEEE 802.15.4/ZigBee模塊。定位系統(tǒng)的網(wǎng)絡(luò)組建以及節(jié)點(diǎn)間的消息傳輸都是通過(guò)ZigBee技術(shù)來(lái)實(shí)現(xiàn)的。
2.節(jié)點(diǎn)傳感器模塊
超聲波測(cè)距傳感器是一種以超聲波為載體的微小型測(cè)距雷達(dá),其具有結(jié)構(gòu)簡(jiǎn)單、體積小、能耗低、信息處理簡(jiǎn)單可靠、價(jià)格低廉的特點(diǎn),不受光照、電磁、粉塵以及煙霧等因素的干擾。為了解決單一超聲波傳感器方向指向性唯一的問(wèn)題,本文采用六元陣列的方法,將六組超聲波收發(fā)探頭均勻分布在正六邊形的邊上,如圖2所示,保證超聲信號(hào)的二維平面全向收發(fā)。
3.節(jié)點(diǎn)處理器模塊
由于節(jié)點(diǎn)要在野外環(huán)境中,無(wú)法進(jìn)行電源的供給,節(jié)點(diǎn)需要保持盡可能長(zhǎng)時(shí)間的工作狀態(tài)或者處于待機(jī)狀態(tài),這也就要求處理器的能量消耗要盡可能小,延長(zhǎng)節(jié)點(diǎn)的壽命。所以選取高性能、低功耗的控制器在節(jié)點(diǎn)設(shè)計(jì)中至關(guān)重要。TMS320C6748TM DSP是TI公司生產(chǎn)的一款新型低功耗浮點(diǎn)型DSP處理器,屬于C6000系列,采用了超長(zhǎng)指令字(Very Long Instruction Word, VLIW)結(jié)構(gòu),為DSP的高效運(yùn)行提供了保障。它融合了TMS320C67xTM DSP 和TMS320C64xTM DSP 的指令集架構(gòu),支持DSP的高數(shù)字信號(hào)處理性能和精簡(jiǎn)指令計(jì)算機(jī)(Reduced Instruction Set Computer, RISC)技術(shù),滿足當(dāng)前的應(yīng)用場(chǎng)景需求。除高速處理能力、極低的功耗以及豐富的外設(shè)接口外,還具有音頻、視頻等多媒體能力以及高速STAT硬盤和SD接口的外部存儲(chǔ)器接口等,由于這些不是本論文關(guān)注的焦點(diǎn),在此不贅述。
二.節(jié)點(diǎn)通信消息設(shè)計(jì)
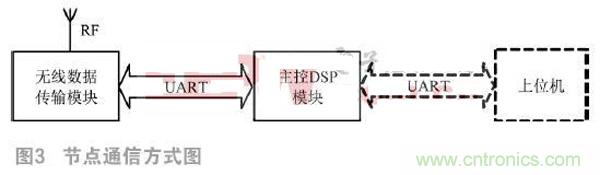
在傳感器網(wǎng)絡(luò)中,采用ZigBee通信協(xié)議時(shí),節(jié)點(diǎn)被分為Coordinator、Router以及End Device三種。Coordinator負(fù)責(zé)系統(tǒng)的初始化工作,選擇網(wǎng)絡(luò)的信道等參數(shù)建立網(wǎng)絡(luò),供其他節(jié)點(diǎn)加入;Router負(fù)責(zé)節(jié)點(diǎn)之間命令消息的路由轉(zhuǎn)發(fā)實(shí)現(xiàn);End Device負(fù)責(zé)任務(wù)是消息的發(fā)送和接收,只能和父節(jié)點(diǎn)進(jìn)行數(shù)據(jù)通信,不具有路由轉(zhuǎn)發(fā)的功能。在本系統(tǒng)中,Sink節(jié)點(diǎn)主要負(fù)責(zé)監(jiān)控網(wǎng)絡(luò)的建立、上位機(jī)命令的分析處理和操作、數(shù)據(jù)的收集等任務(wù),是整個(gè)網(wǎng)絡(luò)的數(shù)據(jù)存儲(chǔ)和處理中心,在上位機(jī)和監(jiān)控網(wǎng)絡(luò)之間起到橋梁的作用,是系統(tǒng)應(yīng)用中的Coordinator。監(jiān)控網(wǎng)絡(luò)區(qū)域內(nèi)的待定位節(jié)點(diǎn)要具備消息轉(zhuǎn)發(fā)與路由其他節(jié)點(diǎn)的能力,需要可以給所有節(jié)點(diǎn)發(fā)送消息,也可以接收到所有節(jié)點(diǎn)的消息,是系統(tǒng)應(yīng)用中的Router。每個(gè)節(jié)點(diǎn)由無(wú)線數(shù)據(jù)傳輸模塊和主控DSP模塊組成,同一節(jié)點(diǎn)的兩個(gè)模塊之間通過(guò)UART總線進(jìn)行通信。節(jié)點(diǎn)之間通過(guò)無(wú)線RF射頻方式進(jìn)行通信。Sink節(jié)點(diǎn)與上位機(jī)使用UART總線進(jìn)行通信,未知節(jié)點(diǎn)的通信方式中并不包含該通信方式。節(jié)點(diǎn)的通信方式如圖3所示。
1.Sink節(jié)點(diǎn)任務(wù)設(shè)計(jì)
Sink節(jié)點(diǎn)(Coordinator)的任務(wù)主要包括節(jié)點(diǎn)的初始化、建立網(wǎng)絡(luò)以及應(yīng)用層任務(wù)命令。這里將Sink節(jié)點(diǎn)的無(wú)線模塊和DSP模塊看作一個(gè)整體,Sink節(jié)點(diǎn)程序流程圖如圖4所示。應(yīng)用層任務(wù)命令包括檢測(cè)和分析上位機(jī)下發(fā)的命令以及根據(jù)上位機(jī)命令做出相應(yīng)的處理操作。應(yīng)用層命令主要是Sink節(jié)點(diǎn)分別和上位機(jī)、定位網(wǎng)絡(luò)之間的交互。
三.定位系統(tǒng)實(shí)驗(yàn)及結(jié)果分析
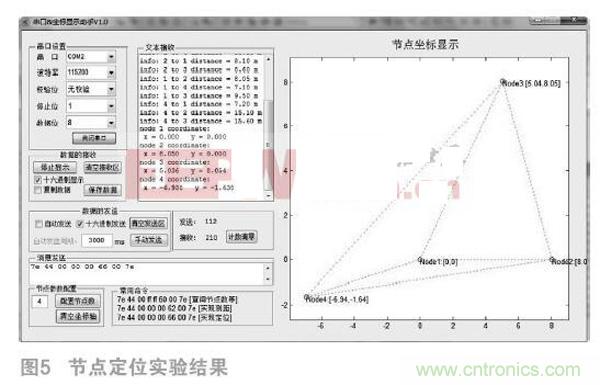
節(jié)點(diǎn)的測(cè)距性能主要通過(guò)節(jié)點(diǎn)的測(cè)距精度直觀反映,而節(jié)點(diǎn)的測(cè)距性能又直接影響系統(tǒng)的定位性能。本文對(duì)已經(jīng)研究設(shè)計(jì)的定位節(jié)點(diǎn)進(jìn)行一系列的測(cè)距定位實(shí)驗(yàn)。首先進(jìn)行節(jié)點(diǎn)的測(cè)距性能實(shí)驗(yàn),然后進(jìn)行節(jié)點(diǎn)的定位性能實(shí)驗(yàn)。本實(shí)驗(yàn)的實(shí)測(cè)環(huán)境是實(shí)驗(yàn)室外走廊,實(shí)驗(yàn)場(chǎng)景如圖5所示,實(shí)驗(yàn)環(huán)境溫度為14~18℃,使用一個(gè)Sink節(jié)點(diǎn)和兩個(gè)未知節(jié)點(diǎn)進(jìn)行實(shí)驗(yàn)。通過(guò)多次測(cè)量,取測(cè)量結(jié)果的平均值作為最終結(jié)果的方式來(lái)減小測(cè)距誤差。實(shí)驗(yàn)過(guò)程中,Sink節(jié)點(diǎn)可以自由移動(dòng),以無(wú)線方式控制兩個(gè)未知節(jié)點(diǎn)進(jìn)行測(cè)距。Sink節(jié)點(diǎn)通過(guò)串口線與PC端連接,使用上位機(jī)軟件進(jìn)行命令的發(fā)送和距離測(cè)量數(shù)據(jù)的收集顯示。將一個(gè)未知節(jié)點(diǎn)設(shè)置為超聲信號(hào)接收節(jié)點(diǎn),放置在一個(gè)固定的位置;另一個(gè)設(shè)置為超聲信號(hào)源節(jié)點(diǎn),等間距移動(dòng)測(cè)量。超聲信號(hào)源節(jié)點(diǎn)從距離接收節(jié)點(diǎn)1m處開(kāi)始測(cè)量,每隔1m進(jìn)行一組測(cè)量,每個(gè)測(cè)量點(diǎn)測(cè)50次,取這50次測(cè)距結(jié)果的平均值作為該測(cè)量點(diǎn)的測(cè)距結(jié)果。
四.結(jié)束語(yǔ)
本文設(shè)計(jì)了節(jié)點(diǎn)的通信方式及消息,在統(tǒng)一的消息格式內(nèi),根據(jù)所要執(zhí)行的任務(wù)的不同,具體設(shè)計(jì)各種應(yīng)用消息;其次,根據(jù)系統(tǒng)需求和節(jié)點(diǎn)類型的不同,設(shè)計(jì)并說(shuō)明了不同節(jié)點(diǎn)的程序流程;同時(shí)設(shè)計(jì)了良好的人機(jī)交互定位界面;最后,對(duì)網(wǎng)絡(luò)節(jié)點(diǎn)的測(cè)距性能和定位性能進(jìn)行實(shí)驗(yàn)分析,驗(yàn)證了系統(tǒng)基本滿足對(duì)測(cè)距范圍和測(cè)距精度要求和節(jié)點(diǎn)定位的技術(shù)要求。



