
【導(dǎo)讀】本應(yīng)用筆記主要講述采用MAX44009環(huán)境光傳感器控制便攜式設(shè)備(譬如智能手機(jī)和平板電腦)背光亮度的應(yīng)用。針對背光亮度調(diào)節(jié),本文介紹了兩種不同的控制方案。此外,本文還就如何獲得更好的控制效果提供了相關(guān)建議,同時也提供了實(shí)現(xiàn)本文所述算法的源代碼。
引言
環(huán)境光傳感器(ALS)集成電路正越來越多地用于各種顯示器和照明設(shè)備,以節(jié)省電能,改善用戶體驗(yàn)。借助ALS解決方案,系統(tǒng)設(shè)計師可根據(jù)環(huán)境光強(qiáng)度,自動調(diào)節(jié)顯示屏的亮度。因?yàn)楸彻庹彰鞯暮碾娏吭谙到y(tǒng)的總耗電量中占據(jù)很大的比例,實(shí)行動態(tài)的背光亮度控制,可節(jié)省大量的電能。此外,它還能夠改善用戶體驗(yàn),讓顯示屏亮度根據(jù)環(huán)境光條件自行調(diào)整到最佳狀態(tài)。
系統(tǒng)實(shí)現(xiàn)需要三大部分:監(jiān)測環(huán)境光強(qiáng)的光傳感器、數(shù)據(jù)處理裝置(通常是微控制器)、控制背光輸入電流的執(zhí)行器。
背光控制:環(huán)境光傳感器
圖1是實(shí)施背光控制的系統(tǒng)示范框圖。在這套組合中,光傳感器是關(guān)鍵的組成部分,因?yàn)樗蛳到y(tǒng)的其他模塊提供環(huán)境光強(qiáng)信息。光傳感器必須具備將光信號轉(zhuǎn)換成電信號的信號轉(zhuǎn)換器(譬如光電二極管或CdS光敏電阻)和信號放大和/或調(diào)節(jié)裝置以及模/數(shù)轉(zhuǎn)換器(ADC)。
圖1. 實(shí)施背光控制的系統(tǒng)框圖
圖2所示為分立光電二極管電路,從圖中可以看出,該電路需要一個或多個運(yùn)算放大器:一個用于電流到電壓的轉(zhuǎn)換,可能還需要一級放大,提供附加增益。它還包括一些分支電路,用于供電,確保高度可靠的信號鏈。而在空間極其寶貴的應(yīng)用中,所需元件的數(shù)量過多可能導(dǎo)致空間受限問題。
圖2. 光電二極管電路分立設(shè)計
這里還存在一個更細(xì)微的問題。具體而言,理想情況下,應(yīng)確保環(huán)境光的測量模擬了人眼對光線的響應(yīng)機(jī)制。這通常借助CIE提供的視覺亮度曲線(圖3)。然而,光電二極管很少能夠完全模擬這種響應(yīng)機(jī)制,因?yàn)樗鼈兺ǔ>哂泻芨叩募t外(IR)靈敏度。在IR強(qiáng)度較大的光照條件(譬如白熾燈或日光)下,這種紅外靈敏度會造成錯誤地判斷光線強(qiáng)度。
解決上述問題的方法之一是使用兩個光電二極管:一個采用對可見光和紅外光都很敏感的元件,另一個采用只對紅外光敏感的元件。最終用前者的響應(yīng)值減去后者的響應(yīng)值,將紅外干擾降至最小,獲得準(zhǔn)確的可見光響應(yīng)。
這種解決方案雖然有效,卻增加了分立電路的占用空間。通常還很難、甚至不可能讓兩個分立的光電二極管配合得足夠緊密,以實(shí)現(xiàn)消除紅外干擾的目的。如果不配備精密放大器(譬如對數(shù)放大器),動態(tài)范圍可能很小。換句話說,很難利用這種組合獲得可重復(fù)的結(jié)果。
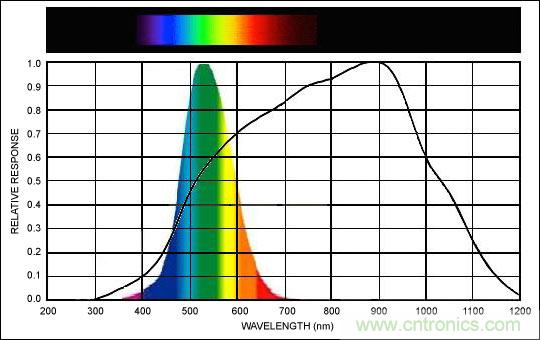
圖3. CIE曲線和典型的光電二極管
高集成度解決方案不僅能夠獲得比人眼光學(xué)系統(tǒng)更真實(shí)的光強(qiáng)數(shù)據(jù),還能夠節(jié)省大量空間MAX44009等環(huán)境光傳感器,可將所有信號調(diào)節(jié)和模/數(shù)轉(zhuǎn)換器集成在一個小封裝(2mm x 2mm UTDFN封裝)內(nèi),從而在空間受限應(yīng)用中有效節(jié)省電路板面積。
圖4提供了MAX44009的功能框圖,采用I²C通信協(xié)議,使其與微控制器的連接方式更簡單,數(shù)據(jù)傳輸速度更快。除此之外,該解決方案的高集成特性使其能夠置于柔性電纜,安裝在離主電路板距離合適的位置。
圖4. MAX44009功能框圖
背光控制:調(diào)節(jié)顯示屏亮度
該控制方案的第二部分是調(diào)節(jié)顯示屏的背光亮度。這可通過多種方式實(shí)現(xiàn),具體取決于設(shè)備中的顯示屏模塊。有兩種最簡單的方式,一種是借助脈沖寬度調(diào)制(PWM)方案的直接調(diào)節(jié)方式,另一種是采用顯示屏控制器的間接調(diào)節(jié)方式。
許多顯示屏模塊如今都配有一個集成控制器,用戶可以通過向控制器發(fā)送串行命令,直接設(shè)置背光亮度。如果顯示屏模塊未配備集成控制器,還可安裝一個簡單的背光控制執(zhí)行器,控制顯示屏后面用于背光照明的白光LED燈的輸入電流。實(shí)現(xiàn)這種控制的一種簡單辦法是:直接給LED串聯(lián)一個場效應(yīng)晶體管(FET),使用PWM信號快速打開、關(guān)閉FET (圖5)。然而,也可以利用單一芯片(用于LED控制的MAX1698升壓轉(zhuǎn)換器)準(zhǔn)確、可靠地調(diào)節(jié)(圖6),請參考應(yīng)用筆記3866“Low-power PWM output controls LED brightness”,獲取詳細(xì)信息。
圖5. 簡單的PMW控制電路
圖6. 基于MAX1698的LED亮度調(diào)節(jié)器
背光控制:建立連接
最后一步就是在傳感器和執(zhí)行器之間建立連接,通過微控制器實(shí)現(xiàn)。有人可能首先要問:“環(huán)境光強(qiáng)如何映射到背光亮度?”事實(shí)上,有些文獻(xiàn)專門介紹了相關(guān)方案。其中一種映射方式是,Microsoft®針對運(yùn)行Windows® 7¹操作系統(tǒng)的計算機(jī)提出的。圖7所示曲線是由Microsoft提供的,它可以將環(huán)境光強(qiáng)度映射到顯示屏亮度(以全部亮度的百分比表示)。
圖7. 將環(huán)境光強(qiáng)映射為最佳顯示屏亮度的曲線示例
這種特殊曲線可以用以下函數(shù)表示:
如果設(shè)備采用的是已集成亮度控制功能的LCD控制芯片,就可通過向芯片發(fā)送指令,輕松設(shè)置背光亮度。如果設(shè)備采用的是PWM直接控制亮度,則要考慮如何將比例信號映射至顯示屏亮度。
在MAX1698示例中,根據(jù)其產(chǎn)品說明書的介紹,可以將驅(qū)動電流映射為電壓。通過這個示例,我們可以假設(shè)LED電流強(qiáng)度幾乎與其電流呈線性關(guān)系。這樣,我們就可以在上述等式中乘上一個系數(shù),計算出PWM所映射的有效電壓,該電壓再被映射至LED電流,最后轉(zhuǎn)化成顯示屏亮度。
方案實(shí)施
最好不要從一個亮度級直接跳轉(zhuǎn)到另一個亮度級,而是平滑上調(diào)和下調(diào)背光亮度,確保不同亮度等級之間無縫過渡。為了達(dá)到這一目的,最好采用帶有固定或不同亮度步長、可逐步調(diào)節(jié)亮度的定時中斷,也可采用帶有可控制LED輸入電流的PWM值的定時中斷,或者是能夠發(fā)送到顯示屏控制器的串行指令的定時中斷。圖8提供了這種算法的一個示例。
圖8. 步進(jìn)式亮度調(diào)節(jié)的算法示例
另一個問題是,系統(tǒng)響應(yīng)環(huán)境光強(qiáng)變化的速度。我們應(yīng)盡量避免過快地改變亮度等級。這是因?yàn)楣鈴?qiáng)的瞬間變化(譬如一扇窗戶打開或瞬間有一束光掃過)可能導(dǎo)致背光亮度發(fā)生不必要的變化,這往往會造成用戶感覺不適。并且,較長的響應(yīng)時間還有助于減少微控制器對光傳感器的檢測次數(shù),從而可以釋放一定的微控制器資源。
最初級的方法就是每隔一兩秒鐘檢查一次光傳感器,然后相應(yīng)地調(diào)整背光亮度。更好的方法是,只有光線強(qiáng)度偏離特定范圍一定時間后,才對背光亮度進(jìn)行調(diào)節(jié)。譬如,如果正常光強(qiáng)是200lux,我們可能只會在光強(qiáng)降到180lux以下或升至220lux以上,而且持續(xù)時間超過數(shù)秒的情況下才調(diào)節(jié)亮度。幸運(yùn)的是,MAX44009集成了中斷引腳和閾值寄存器,可輕松實(shí)現(xiàn)這個目的。
附錄:源代碼
#define MAX44009_ADDR 0x96
// begin definition of slave addresses for MAX44009
#define INT_STATUS 0x00
#define INT_ENABLE 0x01
#define CONFIG_REG 0x02
#define HIGH_BYTE 0x03
#define LOW_BYTE 0x04
#define THRESH_HIGH 0x05
#define THRESH_LOW 0x06
#define THRESH_TIMER 0x07
// end definition of slave addresses for MAX44009
extern float SCALE_FACTOR; // captures scaling factors to map from % brightness to PWM
float currentBright_pct; // the current screen brightness, in % of maximum
float desiredBright_pct; // the desired screen brightness, in % of maximum
float stepSize; // the step size to use to go from the current
// brightness to the desired brightness
uint8 lightReadingCounter;
/**
* Function: SetPWMDutyCycle
*
* Arguments: uint16 dc - desired duty cycle
*
* Returns: none
*
* Description: Sets the duty cycle of a 16-bit PWM, assuming that in this
* architecture, 0x0000 = 0% duty cycle
* 0x7FFF = 50% and 0xFFFF = 100%
**/
extern void SetPWMDutyCycle(uint16 dc);
/**
* Function: I2C_WriteByte
*
* Arguments: uint8 slaveAddr - address of the slave device
* uint8 command - destination register in slave device
* uint8 data - data to write to the register
*
* Returns: ACK bit
*
* Description: Performs necessary functions to send one byte of data to a
* specified register in a specific device on the I2C bus
**/
uint8 2C_WriteByte(uint8 slaveAddr, uint8 command, uint8 data);
/**
* Function: I2C_ReadByte
*
* Arguments: uint8 slaveAddr - address of the slave device
* uint8 command - destination register in slave device
* uint8 *data - pointer data to read from the register
*
* Returns: ACK bit
*
* Description: Performs necessary functions to get one byte of data from a
* specified register in a specific device on the I2C bus
**/
uint8 I2C_ReadByte(uint8 slaveAddr, uint8 command, uint8* data);
/**
* Function: getPctBrightFromLuxReading
*
* Arguments: float lux - the pre-computed ambient light level
*
* Returns: The % of maximum brightness to which the backlight should be set
* given the ambient light (0 to 1.0)
*
* Description: Uses a function to map the ambient light level to a backlight
* brightness by using a predetermined function
**/
float getPctBrightFromLuxReading(float lux);
/**
* Function: mapPctBrighttoPWM
*
* Arguments: float pct
*
* Returns: PWM counts needed to achieve the specified % brightness (as
* determined by some scaling factors)
**/
uint16 mapPctBrighttoPWM(float pct);
/**
* Function: getLightLevel
*
* Arguments: n/a
*
* Returns: the ambient light level, in lux
*
* Description: Reads both the light registers on the device and returns the
* computed light level
**/
float getLightLevel(void);
/**
* Function: stepBrightness
*
* Arguments: n/a
*
* Returns: n/a
*
* Description: This function would be called by an interrupt. It looks at the
* current brightness setting, then the desired brightness setting.
* If there is a difference between the two, the current brightness
* setting is stepped closer to its goal.
**/
void stepBrightness(void);
/**
* Function: timerISR
*
* Arguments: n/a
*
* Returns: n/a
*
* Description: An interrupt service routine which fires every 100ms or so. This
* handles all the ambient light sensor and backlight
* control code.
**/
void timerISR(void);
void main() {
SetupMicro(); // some subroutine which initializes this CPU
I2C_WriteByte(MAX44009_ADDR, CONFIG_REG, 0x80); // set to run continuously
lightReadingCounter = 0;
stepSize = .01;
currentBright_pct = 0.5;
desiredBright_pct = 0.5;
SetPWMDutyCycle(mapPctBrighttoPWM(currentBright_pct));
InitializeTimerInterrupt(); // set this to fire every 100ms
while(1) {
// do whatever else you need here, the LCD control is done in interrupts
Idle();
}
} // main routine
// the point at which the function clips to 100%
#define MAXIMUM_LUX_BREAKPOINT 1254.0
float getPctBrightFromLuxReading(float lux) {
if (lux > MAXIMUM_LUX_BREAKPOINT)
return 1.0;
else
return (9.9323*log(x) + 27.059)/100.0;
} // getPctBrightFromLuxReading
uint16 mapPctBrighttoPWM(float pct) {
return (uint16)(0xFFFF * pct * SCALE_FACTOR);
} // mapPctBrighttoPWM
float getLightLevel(void) {
uint8* lowByte;
uint8* highByte;
uint8 exponent;
uint8 mantissa;
float result;
I2C_ReadByte(MAX44009_ADDR, HIGH_BYTE, highByte);
I2C_ReadByte(MAX44009_ADDR, LOW_BYTE, lowByte);
exponent = (highByte & 0xF0) >> 4;// upper four bits of high byte register
mantissa = (highByte & 0x0F) << 4;// lower four bits of high byte register =
// upper four bits of mantissa
mantissa += lowByte & 0x0F; // lower four bits of low byte register =
// lower four bits of mantissa
result = mantissa * (1 << exponent) * 0.045;
return result;
} //getLightLevel
void stepBrightness(void) {
// if current is at desired, don''t do anything
if (currentBright_pct == desiredBright_pct)
return;
// is the current brightness above the desired brightness?
else if (currentBright_pct > desiredBright_pct) {
// is the difference between the two less than one step?
if ( (currentBright_pct-stepSize) < desiredBright_pct)
currentBright_pct = desiredBright_pct;
else
currentBright_pct -= stepSize;
} // else if
else if (currentBright_pct < desiredBright_pct) {
// is the difference between the two less than one step?
if ( (currentBright_pct+stepSize) > desiredBright_pct)
currentBright_pct = desiredBright_pct;
else
currentBright_pct += stepSize;
} // else if
SetPWMDutyCycle(mapPctBrighttoPWM(currentBright_pct));
return;
} // stepBrightness
void timerISR(void) {
float lux;
float pctDiff;
stepBrightness();
if (lightReadingCounter)
lightReadingCounter--;
else {
lightReadingCounter = 20; // 2 second delay
lux = getLightLevel();
desiredBright_pct = getPctBrightFromLuxReading(lux);
pctDiff = abs(desiredBright_pct - currentBright_pct);
stepSize = (pctDiff <= 0.01) ? 0.01:pctDiff/10;
} // else
ClearInterruptFlag();
} // timerISR
本文來源于Maxim。
推薦閱讀:

