

【導(dǎo)讀】醫(yī)療機器人是指用于醫(yī)院、診所的醫(yī)療或輔助醫(yī)療的機器人,大致可以分為手術(shù)機器人、康復(fù)機器人、護理機器人、救援機器人和轉(zhuǎn)運機器人。其中,手術(shù)機器人在現(xiàn)階段已經(jīng)實現(xiàn)產(chǎn)業(yè)化和商業(yè)化,且大規(guī)模用于臨床。
最為典型的產(chǎn)品就是美國直覺外科公司(Intuitive Surgical)的達芬奇外科手術(shù)機器人。凱泰資本醫(yī)療投資團隊在查閱和調(diào)研大量資料和案例后,對手術(shù)機器人臨床應(yīng)用、市場空間以及技術(shù)趨勢進行分析和預(yù)測,從而挖掘手術(shù)機器人未來的投資機會。
我們希望借此機會,能夠與同行和創(chuàng)業(yè)者共同探討,助力手術(shù)機器人產(chǎn)業(yè)的發(fā)展。凱泰資本將持續(xù)關(guān)注本行業(yè),文末附作者聯(lián)系方式,歡迎同行和創(chuàng)業(yè)者進一步溝通和交流。
01、手術(shù)機器人的臨床應(yīng)用情況
從科室來看,F(xiàn)DA審核批準(zhǔn)的達芬奇手術(shù)機器人可以應(yīng)用于超過10個科室的手術(shù)。
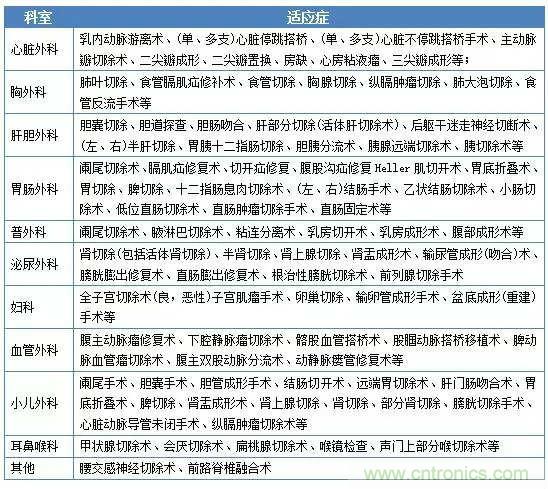
資料來源:公開資料整理
從手術(shù)類型看,達芬奇手術(shù)機器人臨床應(yīng)用可分為傳統(tǒng)操作復(fù)雜的手術(shù)和較為簡單的良性腫瘤切除手術(shù)兩類。根據(jù)直覺外科公司年報,2015年美國手術(shù)機器人的總手術(shù)量為49.9萬例,其中泌尿外科占20%,婦科占48%,普外占28%。具體科室和代表手術(shù)情況如下。
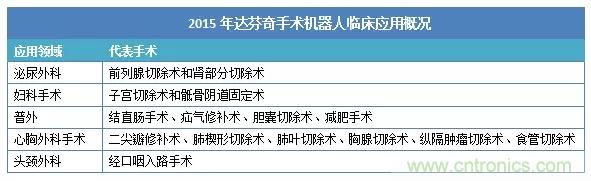
資料來源:直覺外科公司年報
我國2013年及以前配置了18臺手術(shù)機器人,2015年,我國的手術(shù)機器人數(shù)量大約為57臺。截至2012年,我國手術(shù)機器人臨床應(yīng)用最多的三個科室為普外科、心臟外科和泌尿外科。

截至2015年12月,全國當(dāng)年完成手術(shù)機器人手術(shù)11445例,歷年總計完成手術(shù)22917例,臨床應(yīng)用最多的三個領(lǐng)域為泌尿外科、普外科和胸外科。
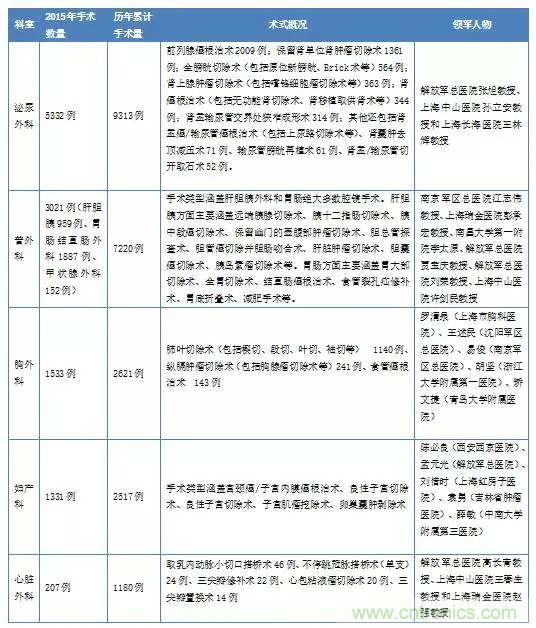
2012年和2015年,國內(nèi)手術(shù)機器人手術(shù)量比較

02、國內(nèi)手術(shù)機器人市場規(guī)模預(yù)估
根據(jù)WinterGreen Research數(shù)據(jù),2014年全球手術(shù)機器人市場規(guī)模達到32億美元,預(yù)計在2021年達到200億美元,復(fù)合增長率約為30%?,F(xiàn)階段,北美市場為最大市場,而由于政府醫(yī)療投入加大,醫(yī)療系統(tǒng)重組和人們對微創(chuàng)手術(shù)意識加強,未來市場重心將逐漸往亞洲市場轉(zhuǎn)移。
根據(jù)直覺外科公司報告,在已獲得認(rèn)證資質(zhì)的國家中,全球每年有400萬臺手術(shù)能夠使用達芬奇手術(shù)機器人完成,市場潛在規(guī)模巨大(按1%滲透率、200臺手術(shù)/年、1000美元/臺手術(shù)材料服務(wù)費估算,設(shè)備需求2萬臺,材料服務(wù)市場40億美元/年)。在手術(shù)機器人最為普及的美國,除前列腺、組織細(xì)胞瘤等手術(shù)以外,開放式手術(shù)(如結(jié)直腸、疝氣、心胸等)仍更為普遍,手術(shù)機器人具有發(fā)展?jié)摿Α?/div>
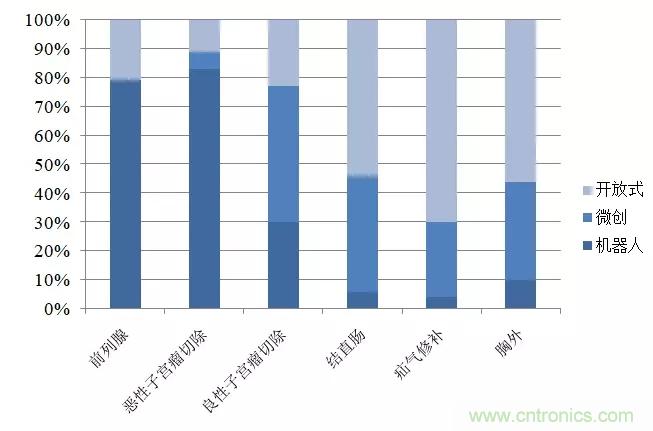

2015年美國部分??剖中g(shù)方式統(tǒng)計
資料來源:公開資料整理
對于中國市場規(guī)模的估算,我們認(rèn)為可以從潛在購買方需求數(shù)量以及適應(yīng)癥市場規(guī)模兩方面進行估算。
對于中國市場,我們認(rèn)為目前二級、三級醫(yī)院將是手術(shù)機器人的潛在購買方,未來隨著手術(shù)機器的成本降低和接受度提高,將逐步滲透普及。中國目前約有2000家三級醫(yī)院、7000家二級醫(yī)院,我們以5000臺潛在需求、以每臺手術(shù)機器人50萬美元估算,潛在手術(shù)機器人設(shè)備市場規(guī)模約25億美元(約150億元);以每臺機器人一年開展200臺手術(shù),每臺手術(shù)1000美元的材料收入估算,手術(shù)材料潛在市場規(guī)模10億美元/年(約60億元)。
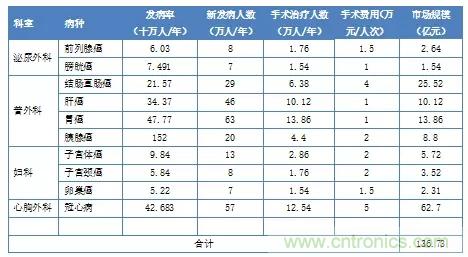
我們根據(jù)手術(shù)機器人的適應(yīng)癥對每年市場規(guī)模進行了測算,認(rèn)為手術(shù)機器人國內(nèi)潛在市場空間為136.73億元/年。其中,泌尿外科和婦科市場規(guī)模為15.73億元,普外科為58.3億元,心臟外科為62.7億元。
數(shù)據(jù)來源:Cancer Statistics in China,2015
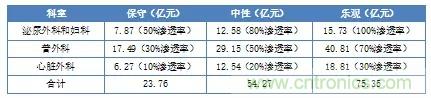
根據(jù)以上測算數(shù)據(jù)以及合理預(yù)計,對國內(nèi)每年的手術(shù)機器人市場規(guī)模進行估算。因此,從保守、中性和樂觀三種測算來看,現(xiàn)階段我國每年手術(shù)機器人服務(wù)市場的規(guī)模為23.76億元、54.27億元和75.35億元。但隨著手術(shù)機器人成本降低以及技術(shù)水平提高,其在普外和心臟外科的滲透率也會提高,市場規(guī)模將進一步擴大。
03、手術(shù)機器人核心技術(shù)及發(fā)展趨勢
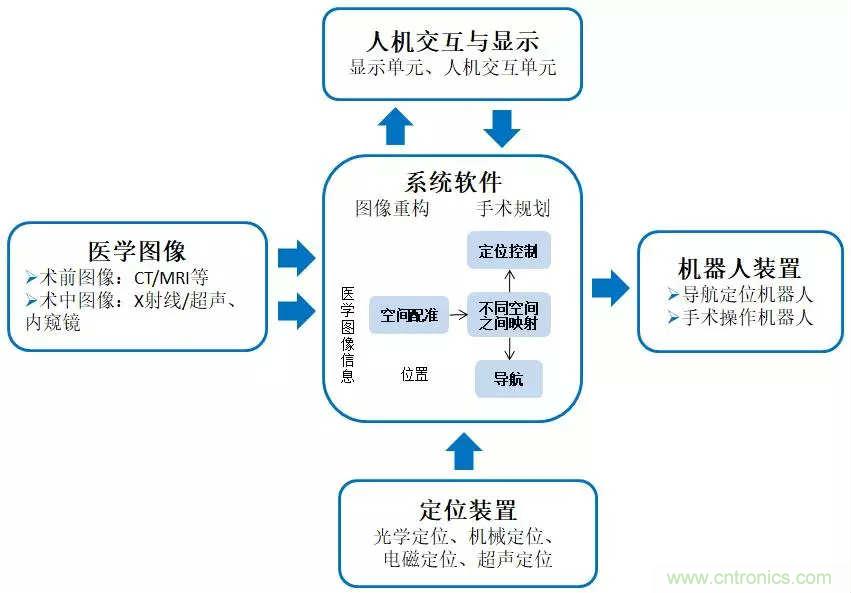
手術(shù)機器人主要的功能模塊包括人機交互與顯示、醫(yī)學(xué)圖像、系統(tǒng)軟件、機器人裝置、定位裝置。系統(tǒng)軟件中的圖像重構(gòu)、空間配準(zhǔn)和定位控制等,是手術(shù)機器人最為核心的部分;而硬件輔助裝置如醫(yī)學(xué)圖像、機器人裝置和定位裝置需要與臨床手術(shù)具體情況相結(jié)合;人機交互與顯示必須充分考慮醫(yī)生的需求和臨床應(yīng)用場景。
資料來源:網(wǎng)絡(luò)公開信息
根據(jù)目前達芬奇手術(shù)機器人的技術(shù)水平以及全球其他相關(guān)技術(shù)的研發(fā),我們認(rèn)為未來手術(shù)機器人的技術(shù)發(fā)展方向在于力觸覺反饋系統(tǒng)、導(dǎo)航定位系統(tǒng)和自然腔道機器人系統(tǒng)。
1、力觸覺反饋功能
現(xiàn)階段應(yīng)用于腹腔鏡臨床手術(shù)的機器人大多采用視覺反饋系統(tǒng),外科醫(yī)生在控制機械臂做手術(shù)時,需要通過分析視覺信息,實時判斷器械對組織的作用力以及其他組織特征,一定程度上影響手術(shù)效率。因此,力觸覺反饋系統(tǒng)將成為機器人技術(shù)研發(fā)的重點方向。
(1)力反饋系統(tǒng)
外科醫(yī)生遠程操作手術(shù)臂時,通過器械末端的力傳感器,感受器械所處位置及作用于組織上的力,并將其以電流的形式進行模擬和傳導(dǎo),之后再將力覺信息再現(xiàn)并傳遞給醫(yī)生。
該系統(tǒng)的核心為力傳感器與力覺再現(xiàn)技術(shù):1)力傳感器主要與手術(shù)器械連接,這就需要重新設(shè)計帶有力傳感的手術(shù)器械,還有一種解決方案是為機械臂設(shè)計一種帶有力傳感的機械抓手,通過抓手與手術(shù)器械相連,實現(xiàn)力反饋的功能。2)力覺再現(xiàn)技術(shù)包括感覺模擬技術(shù)和直接再現(xiàn)技術(shù)。感覺模擬技術(shù)是指將力傳感器上所感受到的力覺信息,模擬成視覺或聽覺信息,并且將這些信息通過顯示器顯示給外科醫(yī)生;直接力覺再現(xiàn)技術(shù),是通過力覺再現(xiàn)設(shè)備將傳感器獲取的力覺信息轉(zhuǎn)換為相應(yīng)的刺激,并且施加于醫(yī)生的手指,以復(fù)現(xiàn)真實的感覺。這使外科醫(yī)生能夠快速地做出相應(yīng)的調(diào)整。
(2)觸覺反饋系統(tǒng)
手術(shù)機器人的觸覺反饋,指機械臂操作器械作用于組織時,觸覺傳感器能夠感受到組織表面的信息(例如組織順應(yīng)性、硬度、質(zhì)地、溫度等),并將這些信息反饋給醫(yī)生,從而使醫(yī)生獲得對于組織的真實感覺,并能夠?qū)Ξ惓=M織做出判斷。觸覺反饋系統(tǒng)主要由3部分組成:1)觸覺信息的感受;2)觸覺信息的處理,即將所獲得信息進行處理,整理得到有效信息;3)觸覺信息的再現(xiàn),將有效信息再現(xiàn)給醫(yī)生。
1)觸覺傳感器:觸覺傳感器通過與物體直接接觸,能夠測定出該物體表面的性質(zhì),包括物理的彈性、硬度、質(zhì)地、溫度等。當(dāng)前所應(yīng)用的觸覺傳感器類型,主要包括電容式傳感器、光電式傳感器、壓電式傳感器及壓阻式傳感器。但是目前這類傳感器多處于實驗室階段,暫未在手術(shù)機器人領(lǐng)域進行應(yīng)用。
2)觸覺信息處理: 觸覺信息的處理系統(tǒng)是觸覺反饋系統(tǒng)的重要組成部分,該系統(tǒng)可以應(yīng)用多種算法來處理觸覺信息,包括簡單的觸覺信息和復(fù)雜的觸覺信息。為了減輕醫(yī)生負(fù)擔(dān),對于復(fù)雜觸覺信息的處理能通過多種方式進行簡化,該系統(tǒng)也可以對多種不同的觸覺信息進行處理。
3)觸覺再現(xiàn)技術(shù): 包括圖像模擬技術(shù)與直接再現(xiàn)技術(shù)。近年來,許多研究者在腔鏡系統(tǒng)上采用圖像模擬技術(shù),在模型上進行腫塊定位實驗,取得了較好的效果。直接的再現(xiàn)技術(shù),是指安裝在醫(yī)生手上的觸覺再現(xiàn)設(shè)備,接受機械臂上的觸覺傳感器輸出的機械臂與組織接觸的信息,刺激人體的相應(yīng)部位,從而再現(xiàn)機械臂與組織接觸的情況。該再現(xiàn)技術(shù)應(yīng)用了微型電機技術(shù)、記憶合金技術(shù)、氣壓驅(qū)動技術(shù)直覺再現(xiàn)技術(shù)充分考慮到醫(yī)生觸覺的特性,符合生理習(xí)慣,因此顯示出了極大的優(yōu)勢。該技術(shù)還處于實驗階段,沒有應(yīng)用于臨床。
觸覺反饋技術(shù)的發(fā)展趨勢包括:1)根據(jù)臨床應(yīng)用設(shè)計手術(shù)器械,使其可以滿足力觸覺反饋的需求;2)完整的觸覺再現(xiàn)技術(shù)涉及形狀、紋理、硬度以及溫度等物理屬性重現(xiàn);3)將力覺和觸覺反饋系統(tǒng)有效的結(jié)合,則醫(yī)生可以通過觸覺反饋系統(tǒng)辨別出不同的組織特性,之后根據(jù)所感受到的不同的組織特性,施加給機械臂最佳的作用力,這樣能夠更有效的提高手術(shù)安全性;4)力觸覺反饋系統(tǒng)與虛擬現(xiàn)實技術(shù)和遠程外科技術(shù)聯(lián)合研究可以實現(xiàn)遠程外科培訓(xùn);5)力觸覺反饋的實現(xiàn)依賴網(wǎng)絡(luò)傳輸,但可能會有時間延遲的潛在風(fēng)險,相應(yīng)的控制系統(tǒng)開發(fā)將成為重點。
香港理工大學(xué)與香港大學(xué)李嘉誠醫(yī)學(xué)院協(xié)力開發(fā)的NSRS外科機器人系統(tǒng),與現(xiàn)時需要在腹部開多個切口(3至6個)的達芬奇系統(tǒng)相比,NSRS可經(jīng)由單一切口或自然腔道進入人體(無切口),功能覆蓋各類腹腔或盆腔手術(shù)?;跈C械臂內(nèi)的微型馬達處于接近末端執(zhí)行器(手術(shù)工具)的位置,機械臂不單能執(zhí)行高精確度的動作,還能提供高敏感度的觸覺或力度反饋。NSRS是全球首個配備了
內(nèi)置馬達,能夠以細(xì)小的體積產(chǎn)生足夠力度,以施行各種體內(nèi)手術(shù)的外科手術(shù)機器人系統(tǒng)。
2、 定位導(dǎo)航系統(tǒng)
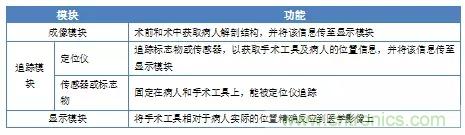
手術(shù)導(dǎo)航系統(tǒng)使醫(yī)生在微創(chuàng)手術(shù)時能了解手術(shù)工具相對于解剖結(jié)構(gòu)的位置。在手術(shù)導(dǎo)航系統(tǒng)出現(xiàn)之前,醫(yī)生只能依靠內(nèi)鏡進行微創(chuàng)手術(shù),或?qū)嵤╅_放式手術(shù)。相比開放性手術(shù),微創(chuàng)手術(shù)有創(chuàng)傷小的優(yōu)勢;相比內(nèi)窺鏡介導(dǎo)下的微創(chuàng)手術(shù),手術(shù)導(dǎo)航系統(tǒng)導(dǎo)航下的微創(chuàng)手術(shù)有精度高、使用范圍廣的優(yōu)勢。手術(shù)導(dǎo)航系統(tǒng)一般包括三個模塊,具體如下表。
(1)成像模塊
理想的成像模塊應(yīng)能實時三維成像,并能分辨病人組織和手術(shù)工具,同時不對病人和醫(yī)生的健康產(chǎn)生危害、不阻礙醫(yī)生進行手術(shù)。目前還不存在滿足上述所有要求的醫(yī)學(xué)成像設(shè)備;在5類常用醫(yī)學(xué)成像設(shè)備中,MRI、超聲最接近以上要求。
(2)追蹤模塊
理想的導(dǎo)航系統(tǒng)并不需要追蹤模塊(解剖結(jié)構(gòu)和手術(shù)工具都能被成像模塊以三維圖像顯示出來),但因為目前成像設(shè)備存在性能局限性,需引入一套追蹤模塊來定位手術(shù)工具和病人。
目前常見三種定位系統(tǒng) :1)磁場定位;2)光學(xué)定位;3)機械定位。這三種定位系統(tǒng)在定位精度上都能滿足目前手術(shù)導(dǎo)航系統(tǒng)的需求,但每種系統(tǒng)都有其局限性:磁場定位易受鐵磁性物體干擾,而且不能和MRI設(shè)備同時使用,精度約為1mm和0.5°;光學(xué)定位必須保證光路暢通,且所追蹤物體必須為剛性,其分別率可達到(<0.1mm);機械定位靈活性有限,設(shè)備所占體積較大。對于腹腔手術(shù)而言,例如肝臟等軟組織多位于人體較深部位,光學(xué)定位可能會受到一定的限制,通過腹腔鏡進行機械定位是目前手術(shù)機器人的主流技術(shù)選擇。
三種追蹤模塊
資料來源:網(wǎng)絡(luò)公開信息
(3)顯示模塊
顯示模塊將術(shù)前成像、術(shù)中成像、手術(shù)器械、患者所處物理空間與定位系統(tǒng)的坐標(biāo)進行統(tǒng)一,為手術(shù)提供更準(zhǔn)確的定位信息。這一過程主要分為兩步:一是使這些影像及信息的坐標(biāo)系達到空間位置的一致,即配準(zhǔn)過程;二是對已配準(zhǔn)圖像及位置信息的綜合顯示,即融合過程。此外,顯示模塊的設(shè)計還會考慮如何使顯示效果更直觀,比如使用立體顯示技術(shù)或現(xiàn)實增強技術(shù)。
手術(shù)定位導(dǎo)航系統(tǒng)的技術(shù)發(fā)展趨勢包括:1)成像模塊的發(fā)展趨勢主要有現(xiàn)有醫(yī)學(xué)成像設(shè)備性能的提升和新醫(yī)學(xué)成像技術(shù)的開發(fā)。2)追蹤模塊已經(jīng)能提供足夠的定位精度,未來的發(fā)展趨勢可能為生產(chǎn)成本的降低。3)顯示模塊中的配準(zhǔn)算法是目前手術(shù)導(dǎo)航系統(tǒng)誤差的主要來源(可占75%),所以還有很大的提高空間。另外三維重建算法也有改善的空間,如提高重建效率和組織識別精度。
MST是一家位于以色列的領(lǐng)先的醫(yī)療器械研發(fā)公司,以數(shù)十億美元的微創(chuàng)手術(shù)市場為目標(biāo),主要產(chǎn)品為用于腹腔手術(shù)的“AutoLap”,其腹腔鏡定位系統(tǒng)能自動為手術(shù)導(dǎo)向和固定。它和Xbox相似,可以識別醫(yī)生的手勢,還可與醫(yī)生手上的無線設(shè)備交互作用,提供在患者身體內(nèi)獲取的數(shù)據(jù)及分析結(jié)果,并幫助醫(yī)生操作。MST的技術(shù)核心是利用軍方在軍事技術(shù)方面的影像分析方面的數(shù)據(jù)和技術(shù),進一步應(yīng)用起來做實時控制的分析。2015年6月上市公司海思科(002653)斥資1050萬美元認(rèn)購以色列醫(yī)療器械公司MST的部分股份,并獲得了Autolap在中國15年的銷售代理權(quán)。
3、自然腔道機器人系統(tǒng)
經(jīng)自然腔道內(nèi)鏡手術(shù)(natural orifice transluminal endoscopic surgery,NOTES) 是指通過自然孔口(口腔、肛門、陰道口、尿道口等) 進入腹腔或胸腔進行操作的一種外科手術(shù)。目前,有機構(gòu)在達芬奇手術(shù)系統(tǒng)上進行NOTES動物實驗,但臨床推廣極難。主要原因在于:1)達芬奇手術(shù)機器人較為龐大,容易與患者身體碰撞;2)狹小的自然腔道導(dǎo)致操作空間狹小,手術(shù)操作非常困難;3)人體解剖機構(gòu)的差異,如陰道穹窿與骶骨胛間的角度及骨盆形態(tài)學(xué)特征等。
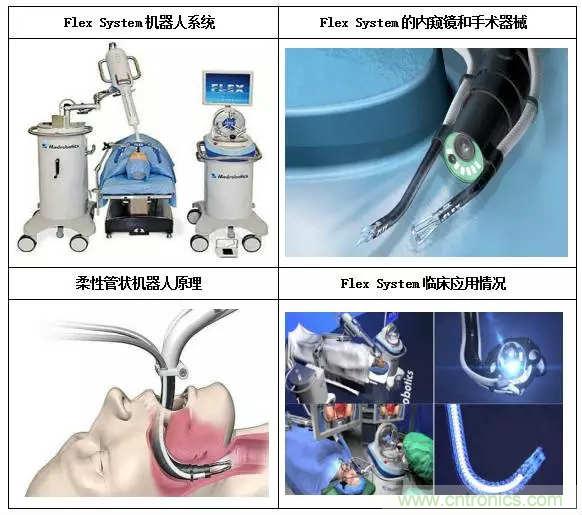
擁有卡耐基梅隆大學(xué)背景的醫(yī)用機器人公司Medrobotics已經(jīng)研發(fā)成功蛇形/柔性管狀機器人Flex System。醫(yī)生將其插入患者的嘴巴,通過操縱桿來控制其移動。醫(yī)生可通過前端有的攝像頭在患者氣管內(nèi)移動機器人,看到并到達非常難到達的解剖區(qū)域。在實際應(yīng)用中,外科醫(yī)生使用可彎曲機器人The Flex進行手術(shù),無需在患者下巴或其他位置進行切口手術(shù)了??蓮澢鷻C器人The Flex找到目標(biāo)后,在主氣管兩側(cè)塞入兩個小管子使機器人變堅硬,從而為提供一個穩(wěn)固的手術(shù)平臺。醫(yī)生可從工作臺中切換包括手術(shù)刀、剪刀、鑷子在內(nèi)的各種工具。
資料來源:Medrobotics官網(wǎng)
此外,由于達芬奇手術(shù)機器人的一體機設(shè)計,在面臨某些??剖中g(shù)過程中存在障礙,因此,我們也重點關(guān)注骨科、神經(jīng)外科、眼科、口腔科等??祁I(lǐng)域的手術(shù)機器人。
04、總結(jié)
1、國內(nèi)手術(shù)機器人在泌尿外科、普外科、胸外科、婦產(chǎn)科及心臟外科的臨床應(yīng)用不斷提升;
2、理論上,現(xiàn)階段我國手術(shù)機器人每年的市場規(guī)模在50億元左右,隨著針對適應(yīng)癥種類增加及滲透率提高,手術(shù)機器人在國內(nèi)每年市場空間超過100億元;
3、手術(shù)機器人的技術(shù)突破將在于力觸覺反饋系統(tǒng)、導(dǎo)航定位系統(tǒng)和自然腔道機器人系統(tǒng)。
推薦閱讀:




