
【導(dǎo)讀】智能服務(wù)機(jī)器人正成為行業(yè)的風(fēng)口浪尖,從清掃機(jī)器人開始,家庭陪伴機(jī)器人、送餐機(jī)器人等陸續(xù)進(jìn)入公眾視線。在討論這類機(jī)器人是否能解決實(shí)際問題時(shí),自主定位導(dǎo)航技術(shù)作為機(jī)器人智能化的第一步正不斷引起行業(yè)內(nèi)的重視。同時(shí),作為自主定位導(dǎo)航技術(shù)的重要突破口,SLAM技術(shù)也成為關(guān)注焦點(diǎn)。
正如圖中所示,機(jī)器人自主定位導(dǎo)航技術(shù)中包括定位、地圖創(chuàng)建與路徑規(guī)劃(運(yùn)動(dòng)控制),而SLAM本身只是完成機(jī)器人的定位和地圖創(chuàng)建,二者有所區(qū)別。

那么,SLAM技術(shù)究竟是如何實(shí)現(xiàn)的?它有哪些難點(diǎn)?機(jī)器人如何實(shí)現(xiàn)路徑規(guī)劃和自動(dòng)導(dǎo)航?到底什么樣的掃地機(jī)器人才算智能?
這些問題,小編將為你一一解答,帶領(lǐng)大家了解機(jī)器人自主移動(dòng)的秘密。
今天,我們先從SLAM說起。
SLAM是同步定位與地圖構(gòu)建(Simultaneous Localization And Mapping)的縮寫,最早由Hugh Durrant-Whyte和John J.Leonard提出。
其實(shí),SLAM更像是一個(gè)概念而不是一個(gè)算法,它本身包含許多步驟,其中的每一個(gè)步驟均可以使用不同的算法實(shí)現(xiàn)。主要用于解決移動(dòng)機(jī)器人在未知環(huán)境中運(yùn)行時(shí)即時(shí)定位與地圖構(gòu)建的問題。
當(dāng)你身處異地,怎么準(zhǔn)確找到想去的地方?在戶外迷路時(shí),怎么找到回家的路?沒錯(cuò),我們有導(dǎo)航軟件和戶外地圖。
和人類繪制地圖一樣,機(jī)器人描述環(huán)境、認(rèn)識(shí)環(huán)境的過程主要就是依靠地圖。它利用環(huán)境地圖來描述其當(dāng)前環(huán)境信息,并隨著使用的算法與傳感器差異采用不同的地圖描述形式。
機(jī)器人學(xué)中地圖的表示方法有四種:柵格地圖、特征地圖、直接表征法以及拓?fù)涞貓D。
1、柵格地圖
機(jī)器人對(duì)環(huán)境地圖的描述的方式最常見的為柵格地圖(Gridmap)或者稱為OccupancyMap。柵格地圖就是把環(huán)境劃分成一系列柵格,其中每一柵格給定一個(gè)可能值,表示該柵格被占據(jù)的概率。
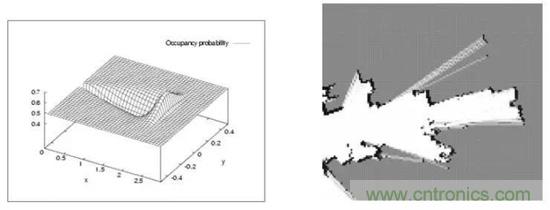
這種地圖看起來和人們所認(rèn)知的地圖沒什么區(qū)別,它最早由NASA的AlbertoElfes在1989年提出,在火星探測(cè)車上就用到過,其本質(zhì)是一張位圖圖片,但其中每個(gè)“像素”則表示了實(shí)際環(huán)境中存在障礙物的概率分布。
一般來說,采用激光雷達(dá)、深度攝像頭、超聲波傳感器等可以直接測(cè)量距離數(shù)據(jù)的傳感器進(jìn)行SLAM時(shí),可以使用該地圖。這種地圖也可以通過距離測(cè)量傳感器、超聲波(早期)、激光雷達(dá)(現(xiàn)在)繪制出來。
2、特征點(diǎn)地圖
特征點(diǎn)地圖,是用有關(guān)的幾何特征(如點(diǎn)、直線、面)表示環(huán)境,常見于vSLAM(視覺SLAM)技術(shù)中。

相比柵格地圖,這種地圖看起來就不那么直觀了。它一般通過如GPS、UWB以及攝像頭配合稀疏方式的vSLAM算法產(chǎn)生,優(yōu)點(diǎn)是相對(duì)數(shù)據(jù)存儲(chǔ)量和運(yùn)算量比較小,多見于最早的SLAM算法中。
3、直接表征法
直接表征法中,省去了特征或柵格表示這一中間環(huán)節(jié),直接用傳感器讀取的數(shù)據(jù)來構(gòu)造機(jī)器人的位姿空間。
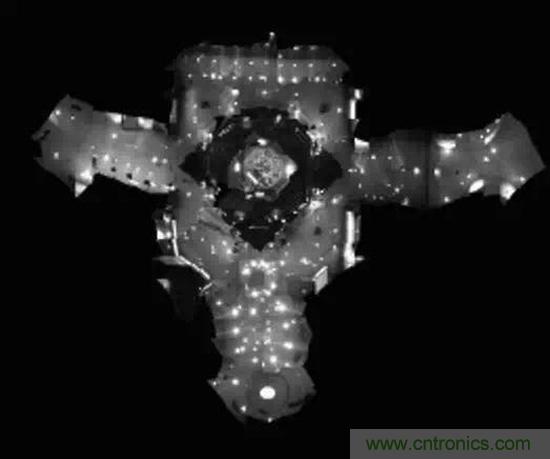
上圖就是直接記錄了屋子內(nèi)天花板畫面的圖像地圖。這種方法就像衛(wèi)星地圖一樣,直接將傳感器原始數(shù)據(jù)通過簡(jiǎn)單處理拼接形成地圖,相對(duì)來說更加直觀。
4、拓?fù)涞貓D
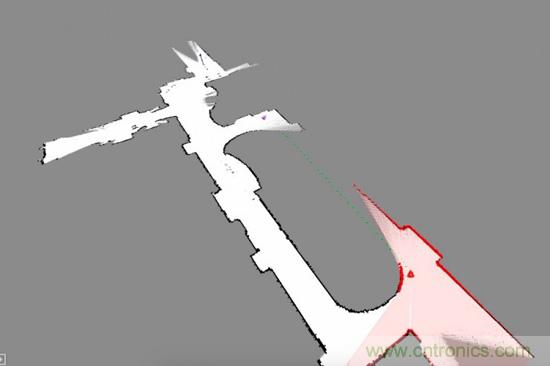
拓?fù)涞貓D,是一種相對(duì)更加抽象的地圖形式,它把室內(nèi)環(huán)境表示為帶結(jié)點(diǎn)和相關(guān)連接線的拓?fù)浣Y(jié)構(gòu)圖,其中結(jié)點(diǎn)表示環(huán)境中的重要位置點(diǎn)(拐角、門、電梯、樓梯等),邊表示結(jié)點(diǎn)間的連接關(guān)系,如走廊等。這種方法只記錄所在環(huán)境拓?fù)滏溄雨P(guān)系,這類地圖一般是由前幾類地圖通過相關(guān)算法提取得到。
比如掃地機(jī)器人要進(jìn)行房間清掃的時(shí)候,就會(huì)建立這樣的拓?fù)涞貓D:

5.小結(jié)
在機(jī)器人技術(shù)中,SLAM的地圖構(gòu)建通常指的是建立與環(huán)境幾何一致的地圖。
一般算法中建立的拓?fù)涞貓D只反映了環(huán)境中的各點(diǎn)連接關(guān)系,并不能構(gòu)建幾何一致的地圖,因此,這些拓?fù)渌惴ú荒鼙挥糜赟LAM。
直接表征法類似衛(wèi)星地圖,它是直接使用傳感器(一般是圖像傳感器)構(gòu)建得到。這種方法的信息冗余度最大,對(duì)于數(shù)據(jù)存儲(chǔ)是很大的挑戰(zhàn),同時(shí),機(jī)器人要從中提取出有用的數(shù)據(jù)也要耗費(fèi)一番周折,因此在實(shí)際應(yīng)用中很少使用。
特征點(diǎn)地圖又是另一個(gè)極端,雖然數(shù)據(jù)量少,但是它往往不能反應(yīng)所在環(huán)境的一些必須的信息,比如環(huán)境中障礙物的位置。vSLAM技術(shù)中,多采用這種地圖來解決機(jī)器人定位問題。想讓機(jī)器人進(jìn)行自主避障和路徑規(guī)劃,還需要額外配置距離傳感器,如激光雷達(dá)、超聲波來完成。
柵格地圖,或者Occupancy Map(占據(jù)地圖)恰好介于其中,一方面它能表示空間環(huán)境中的很多特征,機(jī)器人可以用它來進(jìn)行路徑規(guī)劃,另一方面,它又不直接記錄傳感器的原始數(shù)據(jù),相對(duì)實(shí)現(xiàn)了空間和時(shí)間消耗的最優(yōu)。因此,柵格地圖是目前機(jī)器人所廣泛應(yīng)用的地圖存儲(chǔ)方式。
當(dāng)你打開手機(jī)中的導(dǎo)航軟件,在選擇前往目的地的最佳路線之前,首先要做的動(dòng)作是什么呢?沒錯(cuò),就是定位。我們要先知道自己在地圖中的位置,才可以進(jìn)行后續(xù)的路徑規(guī)劃。
在機(jī)器人實(shí)時(shí)定位問題中,由于通過機(jī)器人運(yùn)動(dòng)估計(jì)得到的機(jī)器人位置信息通常具有較大的誤差,我們還需要使用測(cè)距單元得到的周圍環(huán)境信息更正機(jī)器人的位置。
目前,常見的測(cè)距單元包括激光測(cè)距、超聲波測(cè)距以及圖像測(cè)距三種。其中,憑借激光良好的指向性和高度聚焦性,激光雷達(dá)已經(jīng)成為移動(dòng)機(jī)器人的核心傳感器,同時(shí)它也是目前最可靠、最穩(wěn)定的定位技術(shù)。
自1988年被提出以來,SLAM的理論研究發(fā)展十分迅速。在實(shí)際應(yīng)用時(shí),除配備激光雷達(dá)外,還需要機(jī)器人具有IMU(慣性測(cè)量單元)、里程計(jì)來為激光雷達(dá)提供輔助數(shù)據(jù),這一過程的運(yùn)算消耗是巨大的,傳統(tǒng)上需要PC級(jí)別的處理器,這也成為限制SLAM廣泛應(yīng)用的瓶頸之一。



