
【導讀】近年來無人機市場的發(fā)展,多旋翼無人機以優(yōu)良的操控性能和可垂直起降的方便性等優(yōu)點迅速獲得了廣大消費群體的關注,成為迄今為止最熱銷的產品。多旋翼無機人相較于其它無人機具有得天獨厚的優(yōu)勢,與固定翼飛機相比,它具有可以垂直起降,可以定點盤旋的優(yōu)點;與單旋翼直升機相比,它沒有尾槳裝置,因此具有機械結構簡單、安全性高、使用成本低等優(yōu)點。
多旋翼無人機的諸多優(yōu)點使它在無人機b端市場前景被看好,但也面臨著許多的問題,在電力巡航、物流運輸、消防、植保等領域電動無人機的載重及續(xù)航時間成為制約其發(fā)展的重要因素。此時,燃油動力多旋翼無人機憑借其大載重與長航時的優(yōu)點為b端市場帶來曙光。
油動多旋翼常見分類
常見的油動多旋翼無人機有四旋翼、六旋翼、八旋翼,多旋翼其最大特點就是具有多對旋翼,并且每對旋翼的轉向相反,用來抵消彼此反扭力矩。
多旋翼無人機在飛行過程中需要不斷地調整各個旋翼產生的升力來保持飛行姿態(tài)的平穩(wěn)。常用改變升力的方式有兩種。一種是發(fā)動機轉速恒定,通過調整螺旋槳的螺距改變升力,稱為變槳距方式;另一種是螺旋槳的螺距恒定,通過調整發(fā)動機轉速改變升力,稱為調速方式。兩種方式各有什么特點呢?
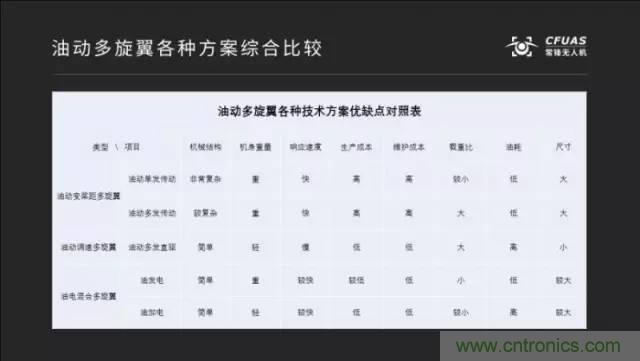
變槳距,也稱為變距、調距:優(yōu)點是響應速度快。缺點是需要復雜的機械結構來調整槳距,造價成本高,維護費用也高。
調速,也稱為變轉速、變速。優(yōu)點是機械結構簡單,調速多發(fā)直驅方式無傳動結構,發(fā)動機直接驅動螺旋槳。造價成本較低,維護費用低。缺點是響應速度較慢。
常見油動多旋翼能源提供方式有純油動和油電混合兩種類型。純油動按控制方式又可分為上面所說的油動變槳距和油動調速;油動變槳距又可細分為單發(fā)傳動和多發(fā)傳動;常見的油動調速只有多發(fā)直驅類型。油電混合常見的只有調速控制方式一種,又可分為油發(fā)電和油加電兩種。

油動單發(fā)傳動變槳距多旋翼
采用一個發(fā)動機提供動力,通過復雜的傳動結構將動力傳到各旋翼并改變旋轉方向。各旋翼轉速相同,以調整螺旋槳螺距的方式改變升力保持姿態(tài)平穩(wěn)。
優(yōu)點:發(fā)動機數量少,發(fā)動機的維護工作量小。響應速度快。
缺點:發(fā)動機動力傳輸到各旋翼的傳動機械結構復雜,各旋翼又需要獨立的變槳距機械結構,導致機械結構非常復雜,機身整體重,制造成本高,機械維護難度大,總體維護費用高。
油動多發(fā)傳動變槳距多旋翼
采用多個發(fā)動機提供動力,每個發(fā)動機帶動一個旋翼,各發(fā)動機轉速相同,以調整螺旋槳螺距的方式改變升力保持姿態(tài)平穩(wěn)。發(fā)動機和旋翼之間需要傳動結構。可以使用正反轉發(fā)動機,也可以只使用正轉發(fā)動機,通過傳動機構換向。
優(yōu)點:傳動結構簡單,響應速度快。
缺點:發(fā)動機個數多,發(fā)動機維護工作量大。各旋翼又需要獨立的傳動結構和變槳距機械結構,機械結構較復雜,機身整體重,制造成本高,總體維護費用高。
油動多發(fā)直驅多旋翼(燃油直驅多旋翼)
常見油動調速多旋翼都是采用多發(fā)調速直驅方式,通常稱為油動直驅多旋翼。
油動直驅多旋翼采用多個發(fā)動機提供動力,每個發(fā)動機帶動一個旋翼,旋翼螺距固定,通過調整發(fā)動機節(jié)氣門控制轉速改變升力,旋翼直接安裝在發(fā)動機的轉軸上,無需傳動結構。
優(yōu)點:無需傳動結構、機械結構簡單,零部件個數少、制造成本低,維護費用較低。
缺點:發(fā)動機個數多,發(fā)動機維護工作量大。機身整體較重,效率與響應速度一般。
油電混合多旋翼
油電混合多旋翼,按照動力方式劃分 ,可分為油發(fā)電與油加電共同發(fā)電兩種。
油發(fā)電多旋翼
油發(fā)電多旋翼是以單個發(fā)動機提供動力帶動發(fā)電機發(fā)電,再以此電能驅動各旋翼上的電機產生升力,無需配備動力電池。各旋翼直接固定在電機轉軸上,無傳動結構。
優(yōu)點:只消耗燃油,補充能源便捷。電機響應速度較快。
缺點:需要發(fā)動機和發(fā)電機,機身整體較重,載重量較小。
油加電多旋翼
油加電多旋翼一般以單個發(fā)動機帶動主旋翼提供升力,多個電動旋翼調整姿態(tài),需配備動力電池。旋翼直接固定在電機或發(fā)動機的轉軸上,無傳動結構。
優(yōu)點:無需發(fā)電機,無傳動結構,機身整體較輕。電機響應速度較快。
缺點:需要添加燃油和攜帶動力電池,補充能源不便捷。
以上各種方案基本都有成功首飛的案例。由于多發(fā)直驅方案具有機械結構簡單,維護方便,載重量大等顯著優(yōu)點,目前已有較好的商業(yè)應用。
其中,深圳常鋒信息技術有限公司全自主研發(fā)生產的天馬-1植保無人機搭載智能噴灑系統(tǒng),采用RTK定位技術、雙天線測向技術、厘米級雷達測高技術,具有載荷量大、噴灑精準、定位精度高、抗地磁干擾、仿地形飛行和全自主作業(yè)等特點,可大幅提高作業(yè)效率,降低作業(yè)成本。已在新疆等地推廣使用。
多旋翼未來發(fā)展趨勢
油動多旋翼的發(fā)展趨勢主要在于兩方面,一個是發(fā)動機,一個是旋翼。
電噴:電噴發(fā)動機是采用電子控制裝置,取代傳統(tǒng)的機械系統(tǒng)(如化油器)來控制發(fā)動機的供油過程。使用電噴發(fā)動機具有省油、提升可靠性、提升響應速度及環(huán)境適應力等優(yōu)點。
啟發(fā)一體化:目前市場上的發(fā)動機使用的電機有直流電動機和帶有調節(jié)器的交流發(fā)電機,分屬啟動系統(tǒng)和充電系統(tǒng),分別固定在發(fā)動機體上,安裝布置不方便,所需安裝空間大,零部件多故障率高。缺乏有效的監(jiān)控控制器,發(fā)電效率不高,不能隨機械需求快速實現調速調節(jié)功率。啟發(fā)一體化就是啟動系統(tǒng)和充電系統(tǒng)一體化,啟動電機可作為發(fā)電機使用,具備發(fā)電功能。發(fā)電機啟動一體化,可以降低成本,減輕機體重量,提升使用便捷性。
再說旋翼機的發(fā)展。多旋翼無人機想在效率方面突破,就不得不考慮將固定翼的原理與優(yōu)缺點,與多旋翼相結合,從而得出更好的解決方案。
復合翼:采用固定翼結合多旋翼的復合翼布局形式,結合多旋翼可垂直起降,無需借助跑道滑行起飛的優(yōu)點,兼具固定翼無人機航時長、速度高、距離遠的特點,有效提升效率。
提問:
油動多旋翼能有效解決電動多旋翼的續(xù)航問題嗎,目前推廣的最大攔路虎是什么?
油動多旋翼解決的是載重和續(xù)航兩個問題,或者說是載重和續(xù)航的乘積(載重續(xù)航積),有些方案可以解決續(xù)航問題,但是受限于功率密度,載重量無法顯著提高,比如氫燃料電池。目前,油動直驅多旋翼商業(yè)化推廣較好,實際使用中發(fā)動機的環(huán)境適應能力是相對比較突出的問題。
飛控對油機的控制如何實現較好的響應,具體在多旋翼上是怎么實現的?
不同的油動多旋翼方案,飛控對發(fā)動機的控制策略是不同的。響應速度對抗風能力有影響,但是抗風性能涉及多個因素,可以通過其他方面彌補響應速度的問題。
如何抑制油動多旋翼的震動噪聲?
機械減震和數字濾波,注意相頻特性。
油動多旋翼植保無人機在未來幾年會不會大有作為?
油動多旋翼植保無人機操作簡便,載重和續(xù)航有優(yōu)勢,適合大面積自動化作業(yè),可以顯著降低成本。我相信未來一定會有很好的表現,大家拭目以待。
油動會不會引發(fā)環(huán)境問題,你們在這方面都做了哪些努力?
一定程度上是存在滑油殘留,但是問題并不嚴重,其實地面植保機械目前也是燃油動力。對于其他應用場景的環(huán)境問題,從橫向比較,相比于廢棄鋰電池的環(huán)境污染,燃油的污染也并不是很嚴重。對此,我們首先從供應鏈選擇上會注意排放問題,另外,我們也在努力創(chuàng)新,采用新的方案。我們的目的是解決載重和續(xù)航的問題,條條大路通羅馬。
(本文內容由常鋒無人機CEO趙自超分享,新智造金紅整理)
推薦閱讀:



