

【導(dǎo)讀】短纖維設(shè)備包括前紡處理和后紡處理兩大設(shè)備。其中后紡設(shè)備和工序包括:集束;牽伸浸油;卷曲;熱定型;切斷;打包;檢驗(yàn);成品;出廠。其中最為重要的是從牽伸到卷曲的工藝過程,該流程中共有4個(gè)傳動(dòng)機(jī)構(gòu)(一道牽伸、二道牽伸、三道牽伸、卷曲),在傳統(tǒng)的工藝中采用一臺(tái)大電機(jī)通過機(jī)械齒輪來單軸控制4個(gè)傳動(dòng)。由于單軸傳動(dòng)的弱點(diǎn)逐漸凸顯出現(xiàn),如齒輪箱損壞率高、牽伸比調(diào)節(jié)困難、單軸容易斷裂等。因此在目前進(jìn)口的化纖后紡設(shè)備中基本上都采用獨(dú)立變頻傳動(dòng)的方式來實(shí)現(xiàn)。
在采用獨(dú)立變頻傳動(dòng)的同時(shí),有二個(gè)最重要的問題必須要加以解決:(1)發(fā)電及能量反饋的問題;(2)同步牽伸的問題。二者都是由于化纖后紡工藝的需要,后紡的一個(gè)重要任務(wù)就是要使纖維絲通過牽伸速度的不同來達(dá)到工藝要求,這就導(dǎo)致了一道和二道牽伸經(jīng)常處于發(fā)電狀態(tài);同時(shí)必須保證4個(gè)獨(dú)立傳動(dòng)在加減速和恒速中同比例升速,這就引出了同步牽伸的問題。
1、 多電機(jī)傳動(dòng)系統(tǒng)的建構(gòu)
在化纖后紡的4個(gè)獨(dú)立傳動(dòng)輥中,為保持一定的牽伸比,通常一道牽伸和二道牽伸處于發(fā)電狀態(tài),三道牽伸和卷曲則處于電動(dòng)狀態(tài)。
1.1 電動(dòng)和發(fā)電
通常從變頻器調(diào)速系統(tǒng)的二種運(yùn)行狀態(tài),即電動(dòng)和發(fā)電。在變頻調(diào)速系統(tǒng)中,電機(jī)的降速和停機(jī)是通過逐漸減小頻率來實(shí)現(xiàn)的,在頻率減小的瞬間,電機(jī)的同步轉(zhuǎn)速隨之下降,而由于機(jī)械慣性的原因,電機(jī)的轉(zhuǎn)子轉(zhuǎn)速未變。當(dāng)同步轉(zhuǎn)速w1小于轉(zhuǎn)子轉(zhuǎn)速w時(shí),轉(zhuǎn)子電流的相位幾乎改變了180度,電機(jī)從電動(dòng)狀態(tài)變?yōu)榘l(fā)電狀態(tài);與此同時(shí),電機(jī)軸上的轉(zhuǎn)矩變成了制動(dòng)轉(zhuǎn)矩Te,使電機(jī)的轉(zhuǎn)速迅速下降,電機(jī)處于再生制動(dòng)狀態(tài)。電機(jī)再生的電能P經(jīng)續(xù)流二極管全波整流后反饋到直流電路。由于直流電路的電能無法通過整流橋回饋到電網(wǎng),僅靠變頻器本身的電容吸收,雖然其他部分能消耗電能,但電容仍有短時(shí)間的電荷堆積,形成“泵升電壓”,使直流電壓Ud升高。過高的直流電壓將使各部分器件受到損害。
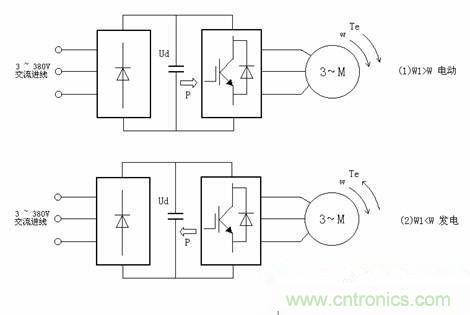
圖1: 變頻器調(diào)速系統(tǒng)的二種運(yùn)行狀態(tài)
如何處理再生電能呢?最簡(jiǎn)單的辦法就是能耗制動(dòng),它采用的方法是在變頻器直流側(cè)加放電電阻單元組件,將再生電能消耗在功率電阻上來實(shí)現(xiàn)制動(dòng),但是由于一道和二道牽伸傳動(dòng)始終處于發(fā)電狀態(tài),其發(fā)電功率是相當(dāng)可觀的,在實(shí)際操作中,需要有龐大的制動(dòng)電阻群。因此如何將該電能利用起來,是一個(gè)急需解決的問題。
1.2 多電機(jī)傳動(dòng)控制的建構(gòu)
對(duì)于頻繁啟動(dòng)、制動(dòng),或是四象限運(yùn)行的電機(jī)而言,如何處理制動(dòng)過程不僅影響系統(tǒng)的動(dòng)態(tài)響應(yīng),而且還有經(jīng)濟(jì)效益的問題。于是,回饋制動(dòng)成為人們討論的焦點(diǎn),然而目前大部分的通用變頻器還不能通過單獨(dú)的一臺(tái)變頻器來實(shí)現(xiàn)再生能量。為解決這個(gè)問題,本文介紹了一種共用直流母線方式的再生能量回饋系統(tǒng),通過這種方式,它可以將制動(dòng)產(chǎn)生的再生能量進(jìn)行充分利用,從而起到既節(jié)約電能又處理再生電能的功效。
多傳動(dòng)控制回路包括直流輸入回路、直流母線供電回路、若干個(gè)逆變器(或是具有輸入缺相保護(hù)的通用變頻器),其中電機(jī)需要的能量是以直流方式通過 PWM逆變器輸出。在多傳動(dòng)方式下,制動(dòng)時(shí)感生能量就反饋到直流回路。通過直流回路,這部分反饋能量就可以消耗在其他處在電動(dòng)狀態(tài)的電機(jī)上,制動(dòng)要求特別高時(shí),只需要在共用母線上并上一個(gè)共用制動(dòng)單元即可。
圖二接線是典型的共用直流母線的制動(dòng)方式,根據(jù)化纖后紡設(shè)備的特點(diǎn),一道牽伸M1和二道牽伸M2在正常工作時(shí)處于發(fā)電狀態(tài),三道牽伸M3和卷曲 M4則處于電動(dòng)狀態(tài)。由于M1和M2發(fā)電是由于3道牽伸的電動(dòng)所引起的,該2臺(tái)電機(jī)所產(chǎn)生的回饋能量足以消耗到處于電動(dòng)狀態(tài)下的M3和M4中,而不會(huì)引起直流回路母線電壓的升高,這樣就完全解決了再生能量的制動(dòng)問題,從而使系統(tǒng)始終處于比較穩(wěn)定的狀態(tài)。
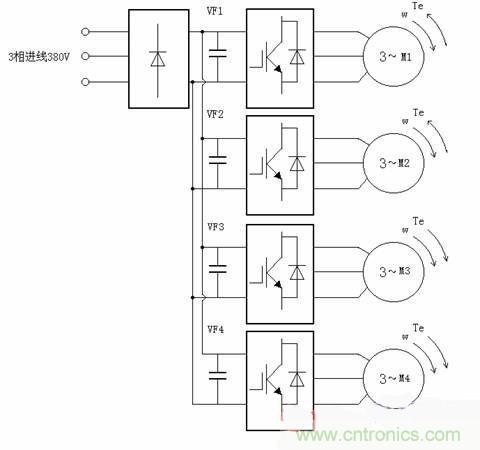
圖2: 共用直流母線的多電機(jī)傳動(dòng)方式
[page]
1.3 直流輸入回路
直流輸入回路負(fù)責(zé)提供多電機(jī)傳動(dòng)系統(tǒng)的直流電源,其主要部件為整流器。但是我們知道,當(dāng)AC/DC電源啟動(dòng)時(shí),將產(chǎn)生一個(gè)高達(dá)系統(tǒng)標(biāo)稱電流50倍的啟動(dòng)電流對(duì)輸入電容(本文主要是指VF1-VF4變頻器的電解電容)充電。該啟動(dòng)電流會(huì)導(dǎo)致主電源上電壓降的產(chǎn)生,從而影響連接到同一個(gè)電源網(wǎng)絡(luò)上的其它設(shè)備的正常工作,甚至熔斷輸入線路熔絲。通常情況下離線電源的前端由一個(gè)橋式整流器和一個(gè)大容量濾波電容組成,啟動(dòng)時(shí)對(duì)大容量濾波電容的充電會(huì)在輸入端產(chǎn)生一個(gè)稱之為啟動(dòng)電流的浪涌電流。如果不限制這一啟動(dòng)電流,那么輸入熔絲就可能熔斷或者可能觸發(fā)電路保護(hù)斷路器。因此直流輸入回路的核心問題是控制啟動(dòng)電流。解決該問題的一種方案是將阻抗與一個(gè)硅通路元件或者機(jī)電繼電器并聯(lián),再與整流器串連,這樣就可以大大降低沖擊電流,以保證直流輸入回路的可靠性。
1.4 多電機(jī)傳動(dòng)的特點(diǎn)
化纖后紡設(shè)備采用共用直流母線的多電機(jī)傳動(dòng)控制方式,具有以下顯著的特點(diǎn):
a. 共用直流母線和共用制動(dòng)單元,可以大大減少整流器和制動(dòng)單元的重復(fù)配置,結(jié)構(gòu)簡(jiǎn)單合理,經(jīng)濟(jì)可靠。
b. 共用直流母線的中間直流電壓恒定,電容并聯(lián)儲(chǔ)能容量大;
c. 各電動(dòng)機(jī)工作在不同狀態(tài)下,能量回饋互補(bǔ),優(yōu)化了系統(tǒng)的動(dòng)態(tài)特性;
d. 提高系統(tǒng)功率因數(shù),降低電網(wǎng)諧波電流,提高系統(tǒng)用電效率。
2、多電機(jī)傳動(dòng)牽伸同步的控制
在化纖后紡設(shè)備的四道傳動(dòng)(三道牽伸加卷曲)中,其牽伸比的確定必須以四個(gè)傳動(dòng)電機(jī)的速度同步為基準(zhǔn)。通常情況下,有一個(gè)主給定信號(hào),同步控制的目標(biāo)就是將這個(gè)信號(hào)按照牽伸比的要求均勻分配到M1、M2、M3、M4四個(gè)變頻器中去,保證四傳動(dòng)無論在加速、恒速或者減速過程中都能保持同步的比例性。
以下主要討論目前較為常用的三種同步控制方案。
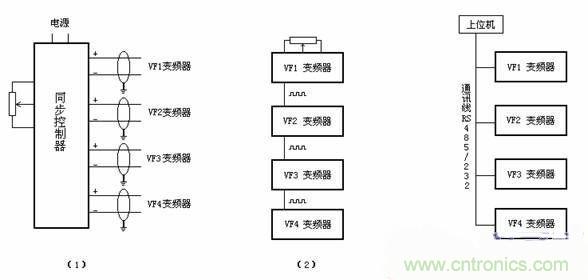
圖3:化纖后紡傳動(dòng)的同步控制方案
2.1 模擬量同步控制
當(dāng)一臺(tái)整機(jī)或一條生產(chǎn)線中各個(gè)傳動(dòng)單元分別由獨(dú)立的變頻器驅(qū)動(dòng)時(shí),為了保證整機(jī)在一個(gè)主令轉(zhuǎn)速的設(shè)置下,各單元同步協(xié)調(diào)工作(這里為固定的牽伸比),需要配置同步控制器。該同步控制器可對(duì)各單元傳動(dòng)速度分別整定,以實(shí)現(xiàn)各單元以一定的比例速度同步工作,總的主令設(shè)定電壓(由電位器決定)通過給定積分器輸出,可實(shí)現(xiàn)軟起動(dòng)和軟停車。
該同步控制器能輸出多路模擬量信號(hào)給變頻器(這里為VF1-VF4)。模擬量輸入設(shè)定方法是一種控制精度較高的方法,一般情況下可達(dá)電壓“11bit+符號(hào)”或電流“10bit”級(jí)別的分辨率。
2.2 脈沖信號(hào)同步控制
在電子技術(shù)中,脈沖信號(hào)是一個(gè)按一定電壓幅度,一定時(shí)間間隔連續(xù)發(fā)出的脈沖信號(hào)。我們將第一個(gè)脈沖和第二個(gè)脈沖之間的時(shí)間間隔稱為周期;而將在單位時(shí)間(如1秒)內(nèi)所產(chǎn)生的脈沖個(gè)數(shù)稱為頻率。
通常情況下,最大輸入脈沖頻率可以在0.1KHz到50KHz之間選擇。VF1變頻器在主令電位器的控制下輸出同步脈沖數(shù)給VF2,VF2接受脈沖數(shù)進(jìn)行運(yùn)轉(zhuǎn)并同時(shí)輸出同步脈沖數(shù)給VF3,直到VF4。由于脈沖信號(hào)的數(shù)字處理技術(shù)和抗干擾能力強(qiáng),因此在同步控制中也被廣泛使用。
2.3 通訊總線同步控制
通過網(wǎng)絡(luò)設(shè)定頻率是一種高精度的頻率設(shè)定,其具有通訊速率高,穩(wěn)定可靠,接線簡(jiǎn)單等優(yōu)點(diǎn),而且在模擬量控制時(shí),輸出端經(jīng)過一個(gè)數(shù)模轉(zhuǎn)換器,經(jīng)過導(dǎo)線,進(jìn)入輸入端(變頻器)又需要經(jīng)過一個(gè)模數(shù)轉(zhuǎn)換器才能參與控制。兩個(gè)轉(zhuǎn)換器位數(shù)不同和導(dǎo)線損耗都可能造成一定誤差,而通訊傳遞直接是數(shù)字量不需要轉(zhuǎn)換,沒有誤差,在傳輸過程中不會(huì)造成損耗,而且響應(yīng)速度率也會(huì)很高。
通常情況下,同步控制可采用RS485總線的異步通訊控制方式,如圖(3)所示。選用變頻器標(biāo)準(zhǔn)內(nèi)置的RS485可以方便實(shí)現(xiàn)與上位機(jī)的通訊,同時(shí)也可掛現(xiàn)場(chǎng)總線或局域網(wǎng),通過網(wǎng)絡(luò)進(jìn)行信息交換,主要有PROFIBUS、Modbus、FF等對(duì)應(yīng)不同的網(wǎng)絡(luò)及總線形式,但必須配用專用接口卡。
無傳感器BLDC電機(jī)控制走向低成本
詳述基于模型的高級(jí)電機(jī)控制系統(tǒng)設(shè)計(jì)
技術(shù)解析:雙口RAM通訊在電機(jī)控制中的應(yīng)用


